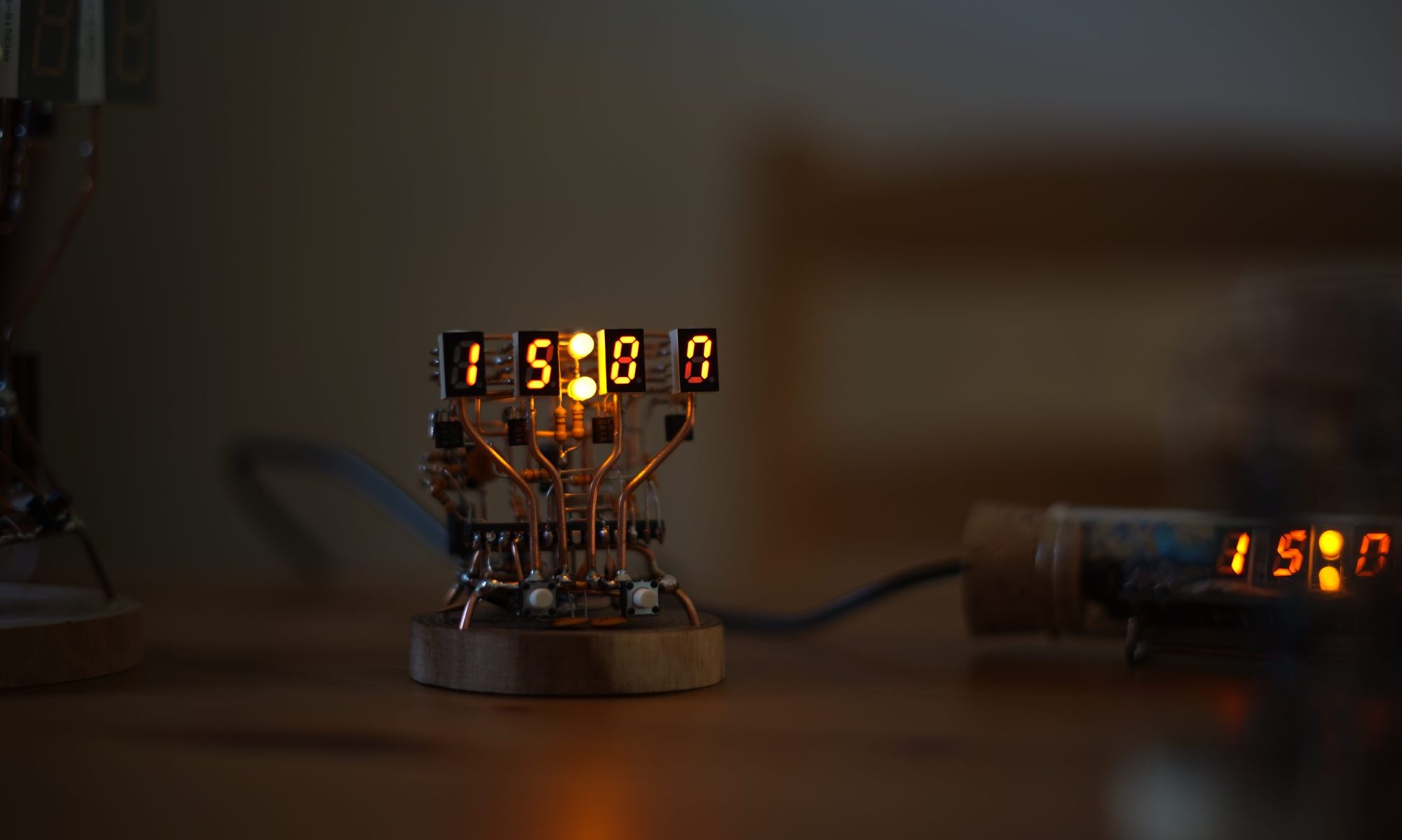
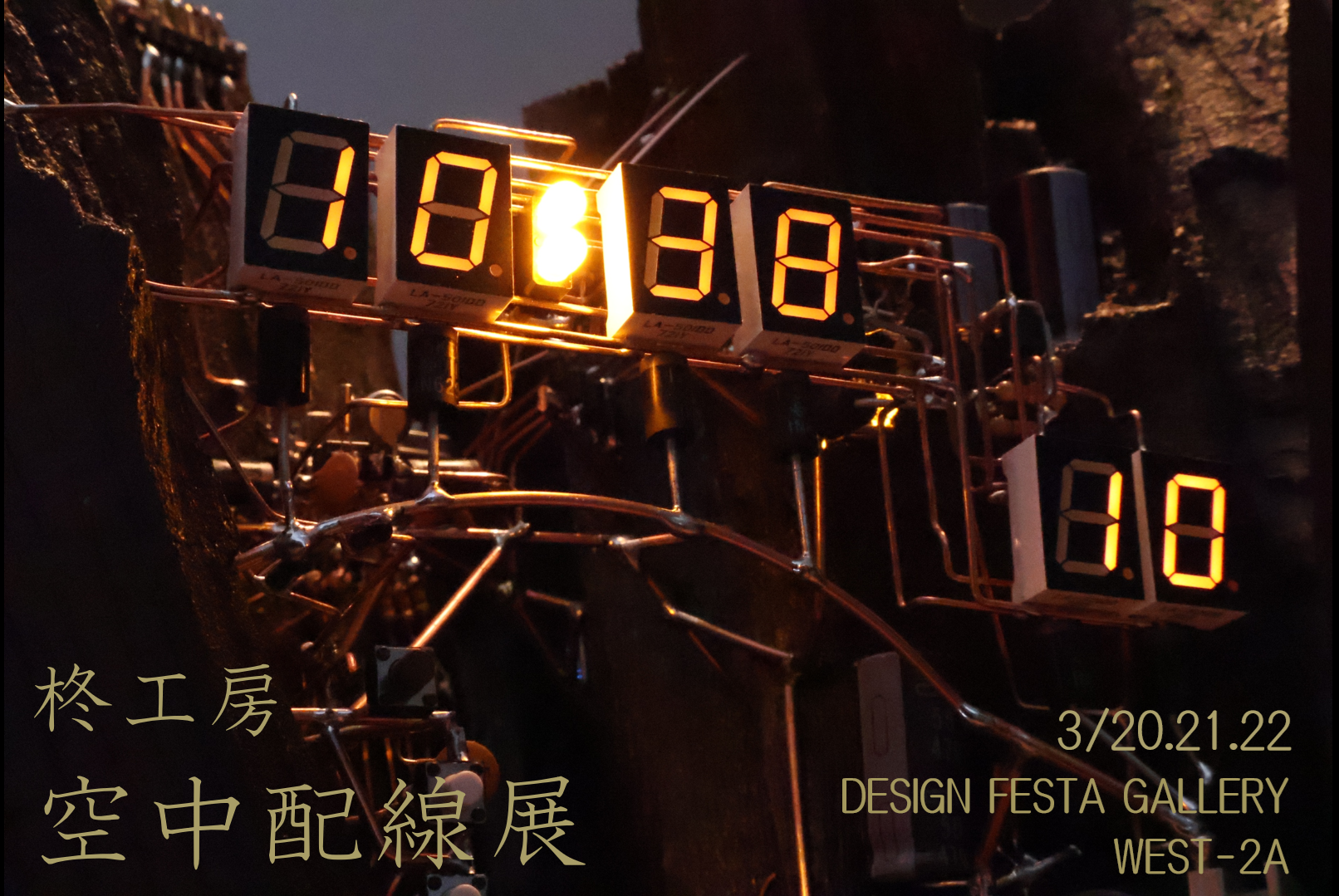
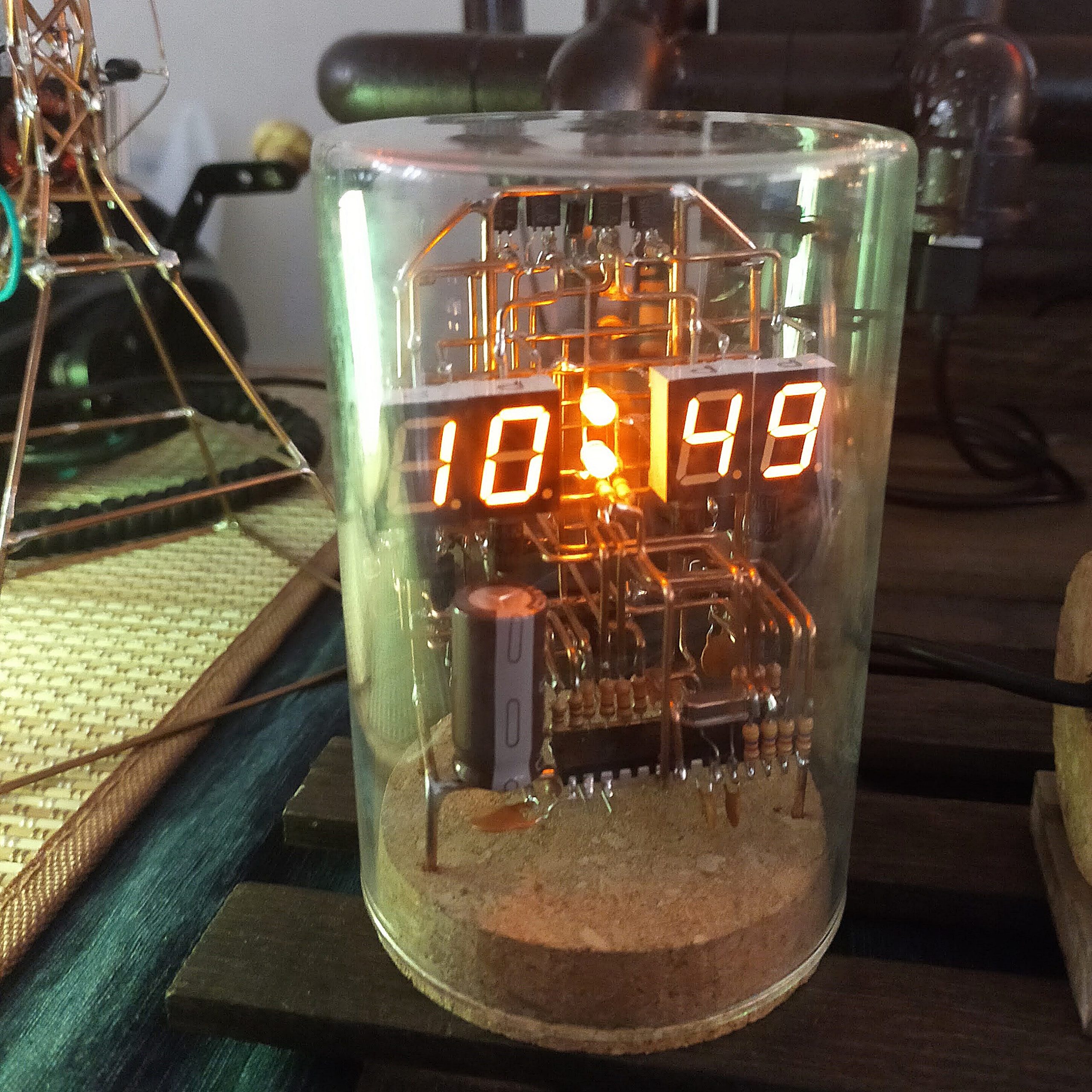
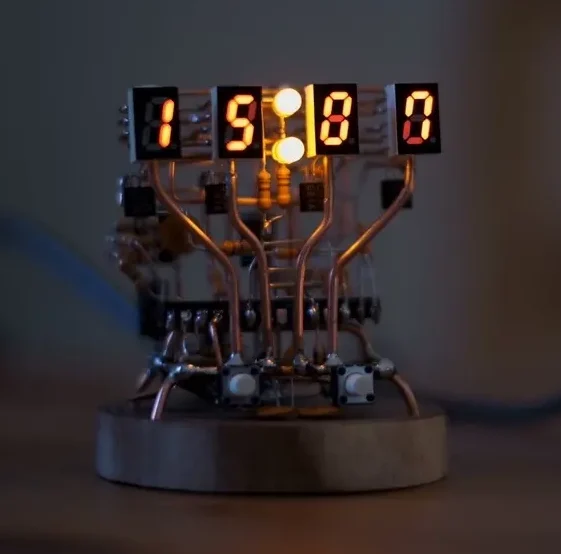
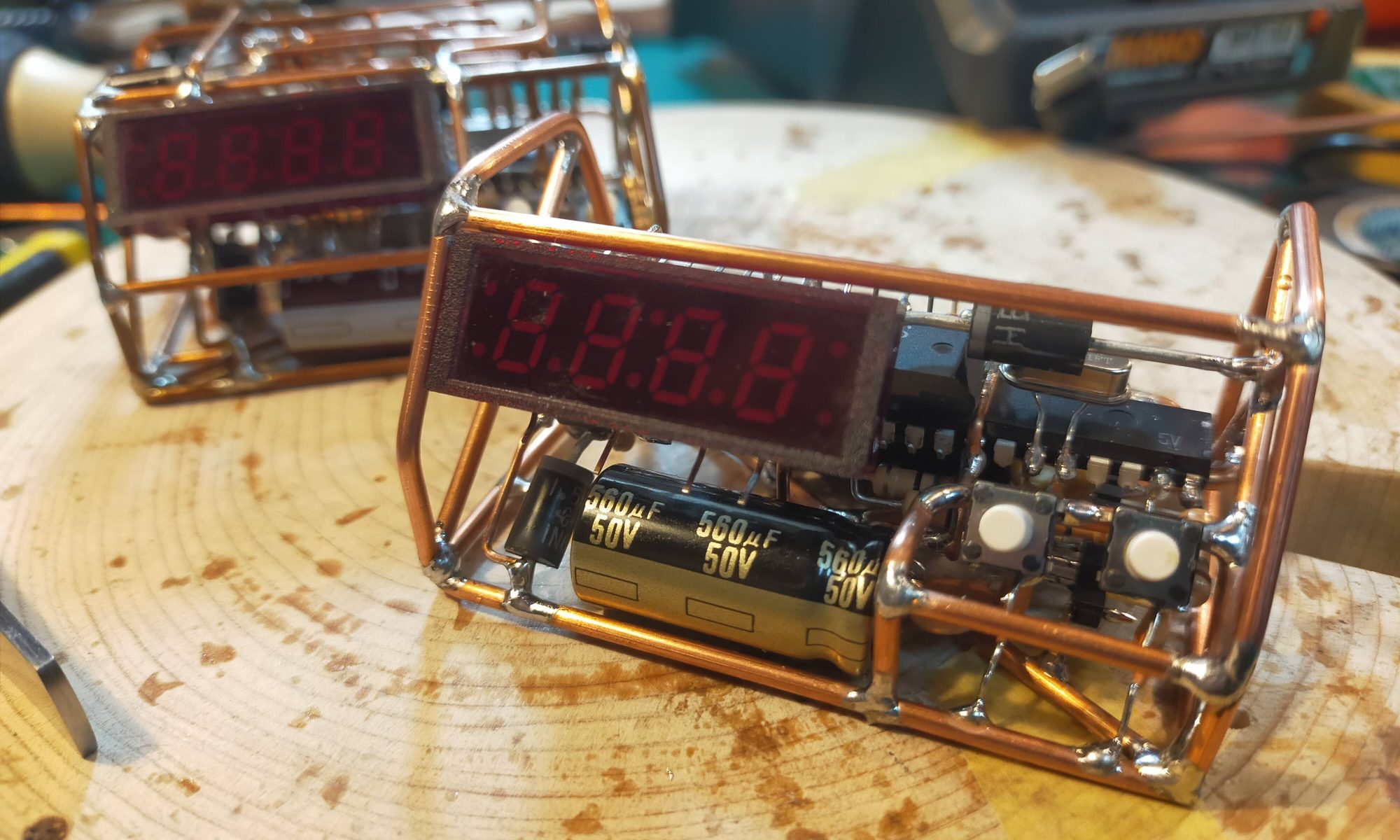
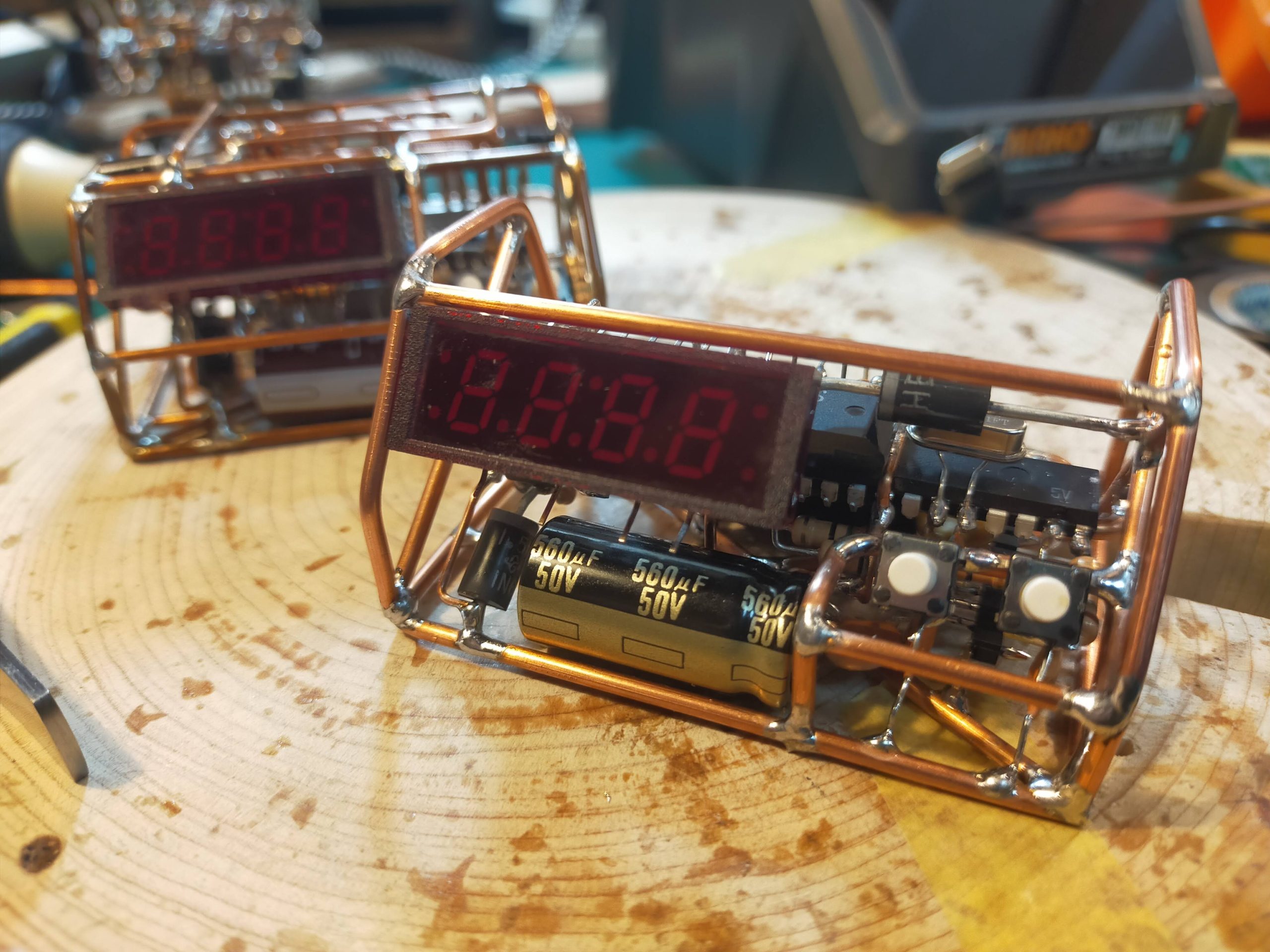
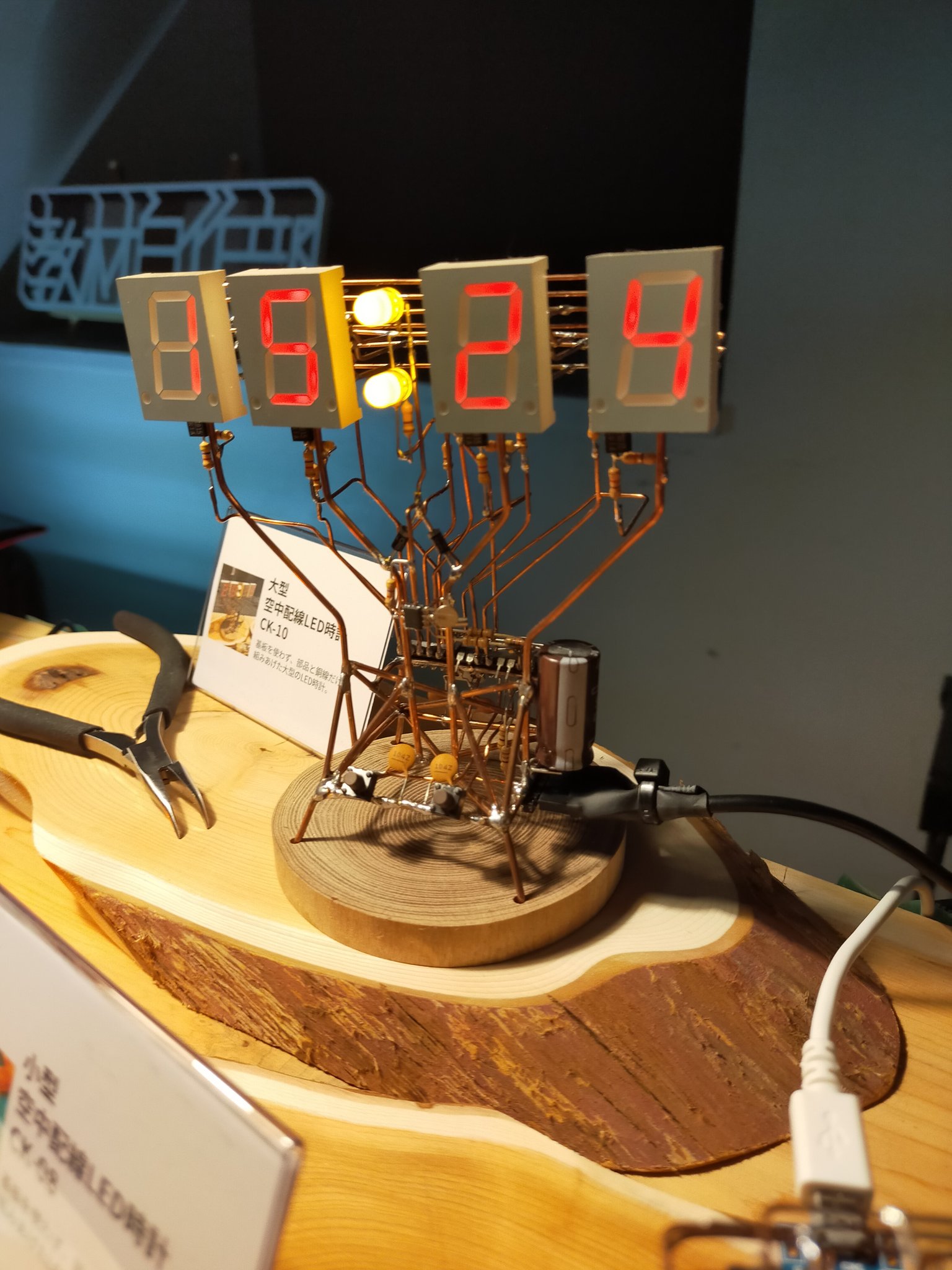
This clock seems to capture the low rumble heard in industrial zones at night. Copper wires stretched through the air resemble piping under intense heat. ICs and coils pulse silently, like the heart of a dormant furnace. Enjoy this “reactor core that burns time.” The clock is fully functional and can be set to the correct time.
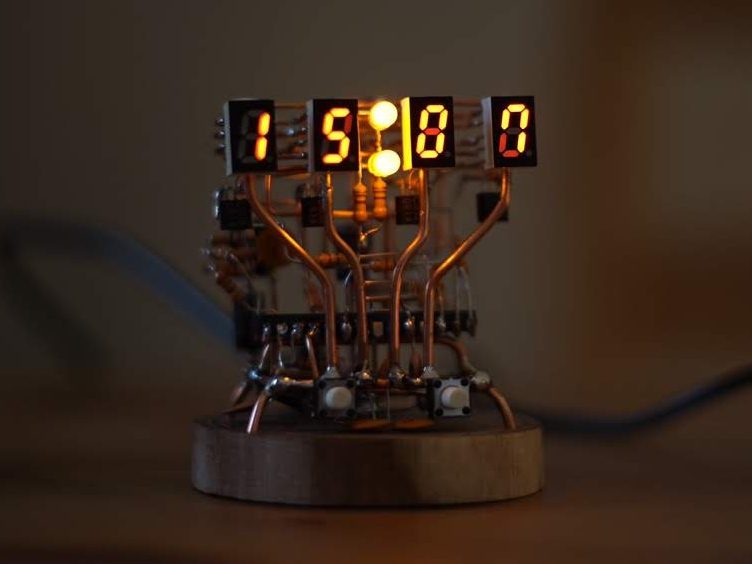
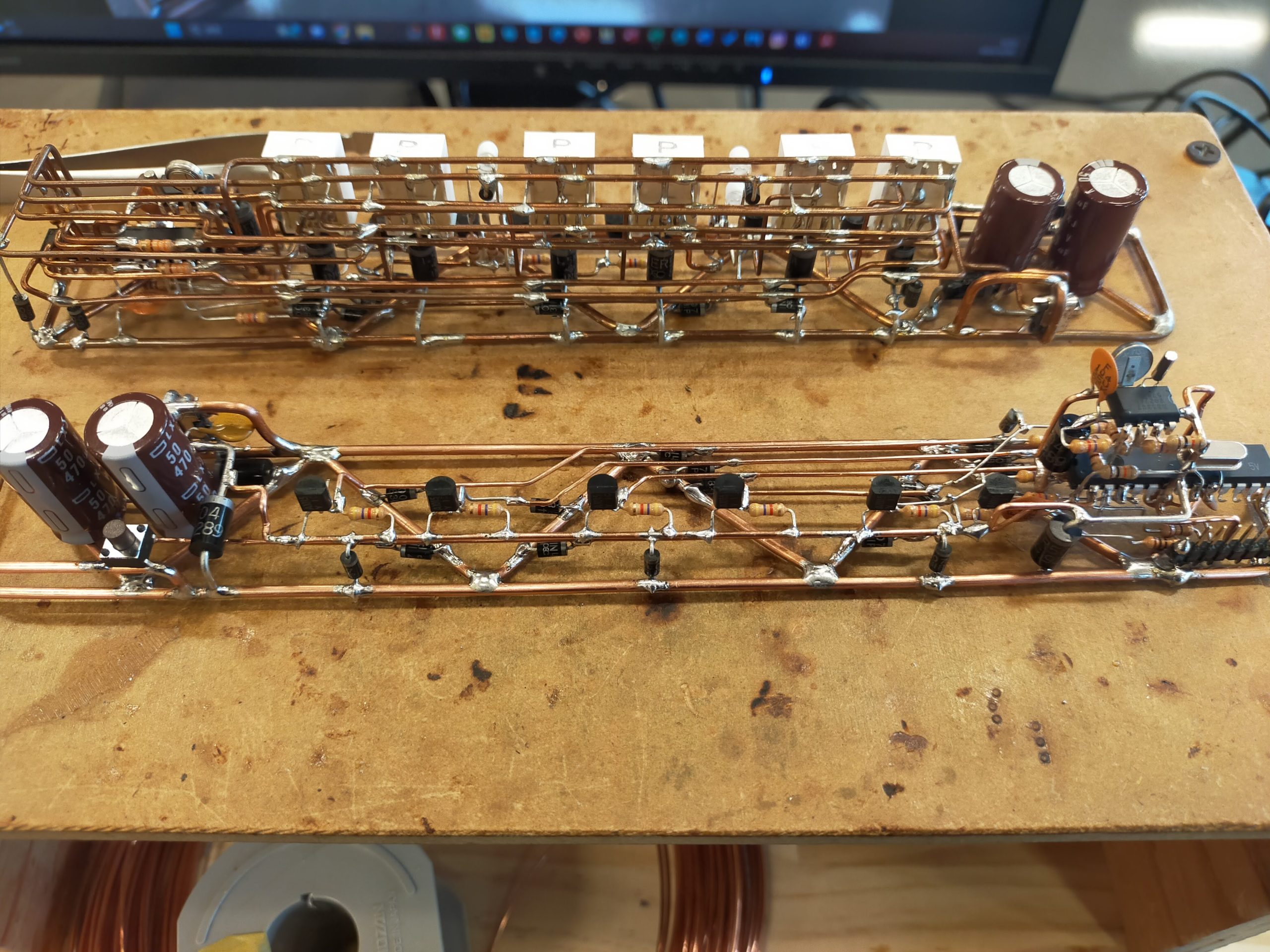
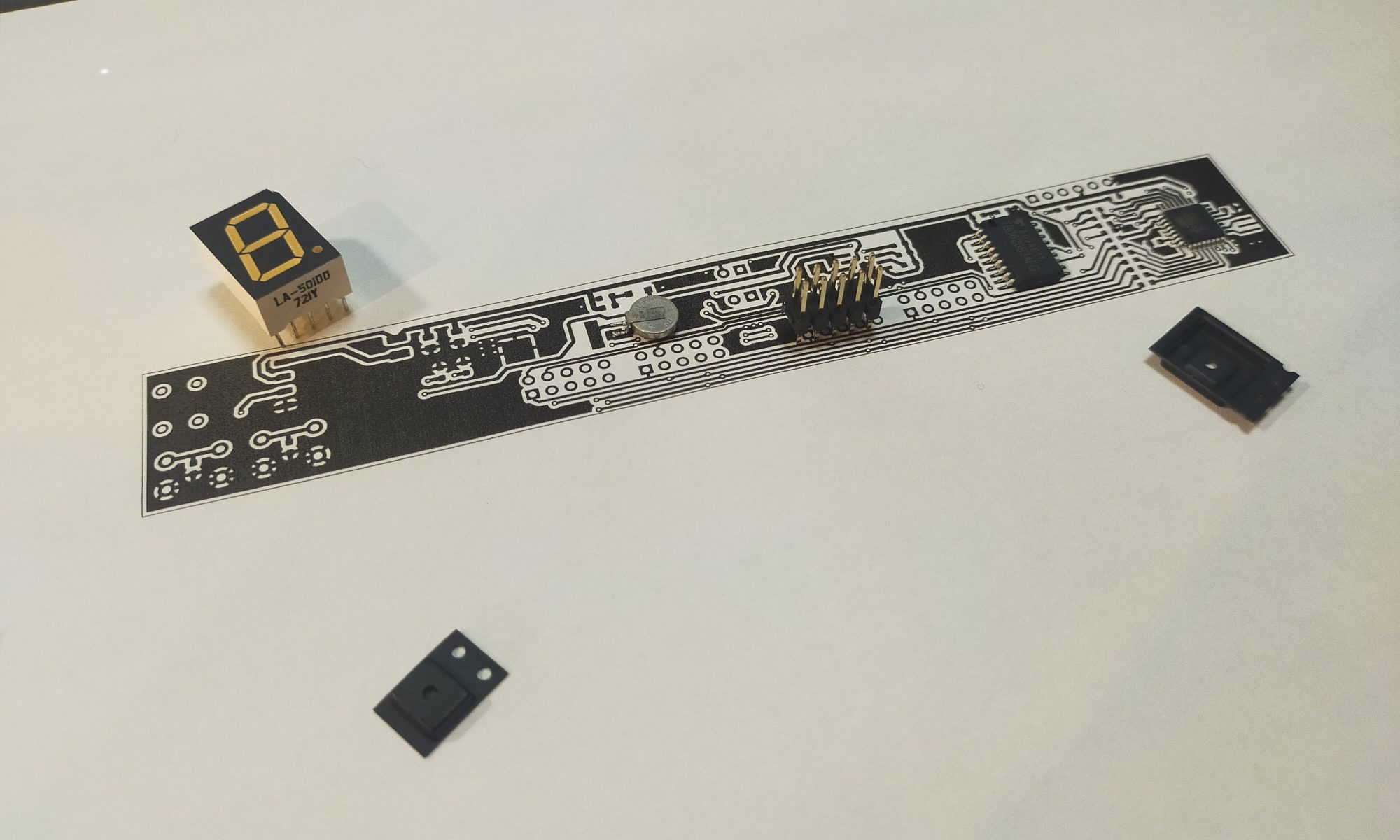
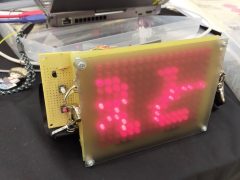
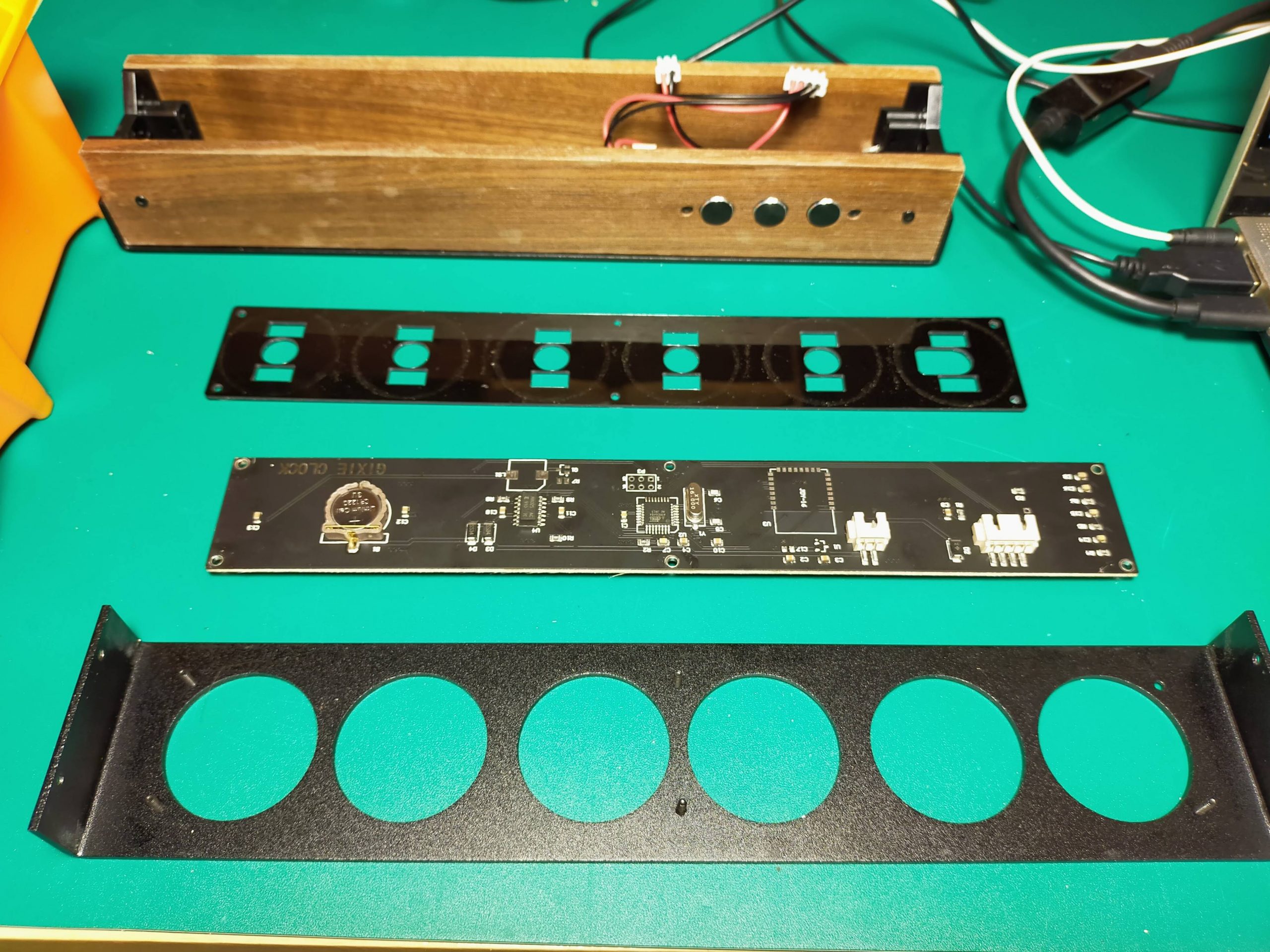
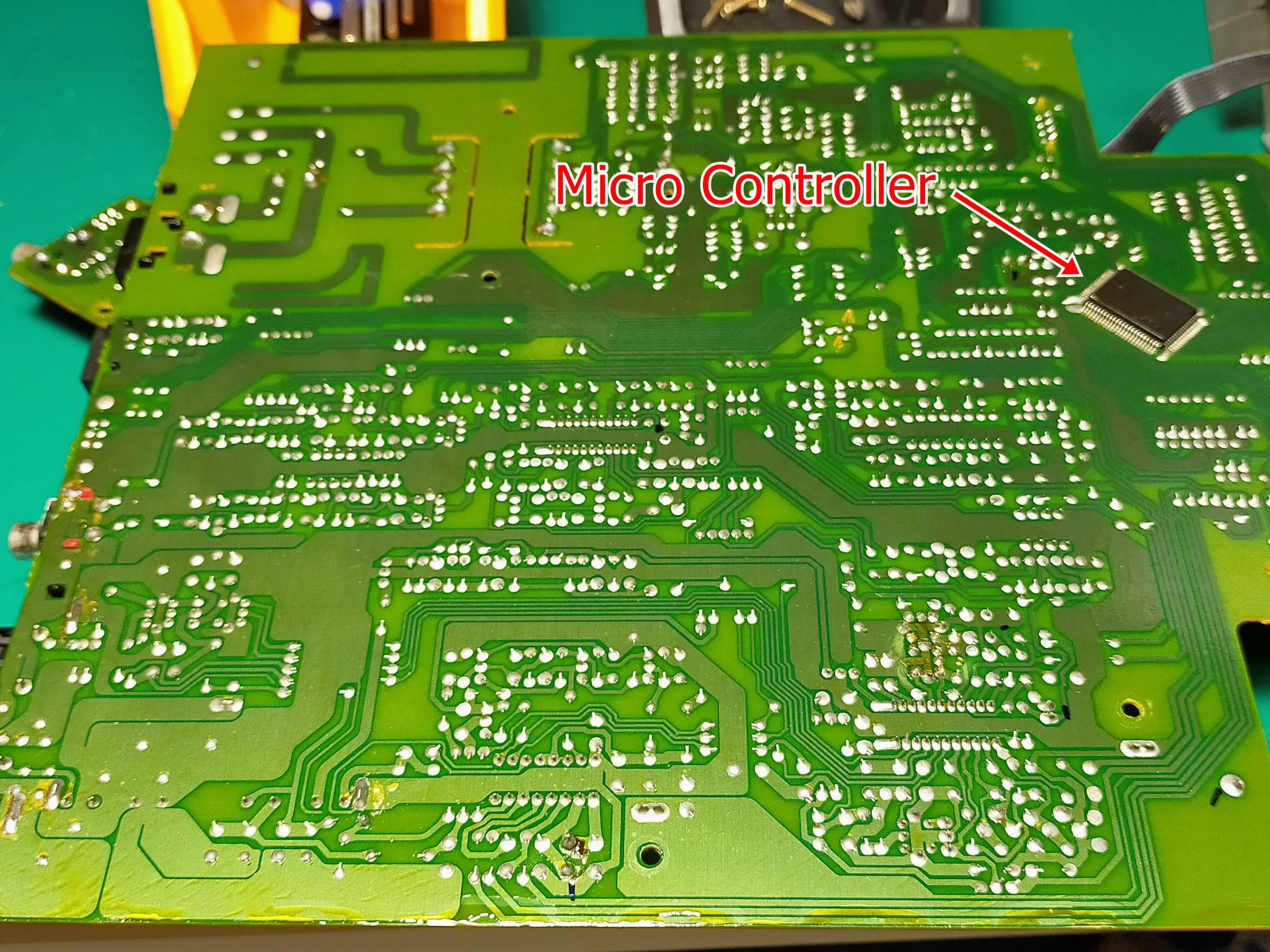
The time is displayed on the orange 7-segment LED in the center. Behind it, the circuitry essential for the clock—including the microcontroller and real-time clock IC—is densely packed. Additionally, the time-setting buttons are located at the bottom right.
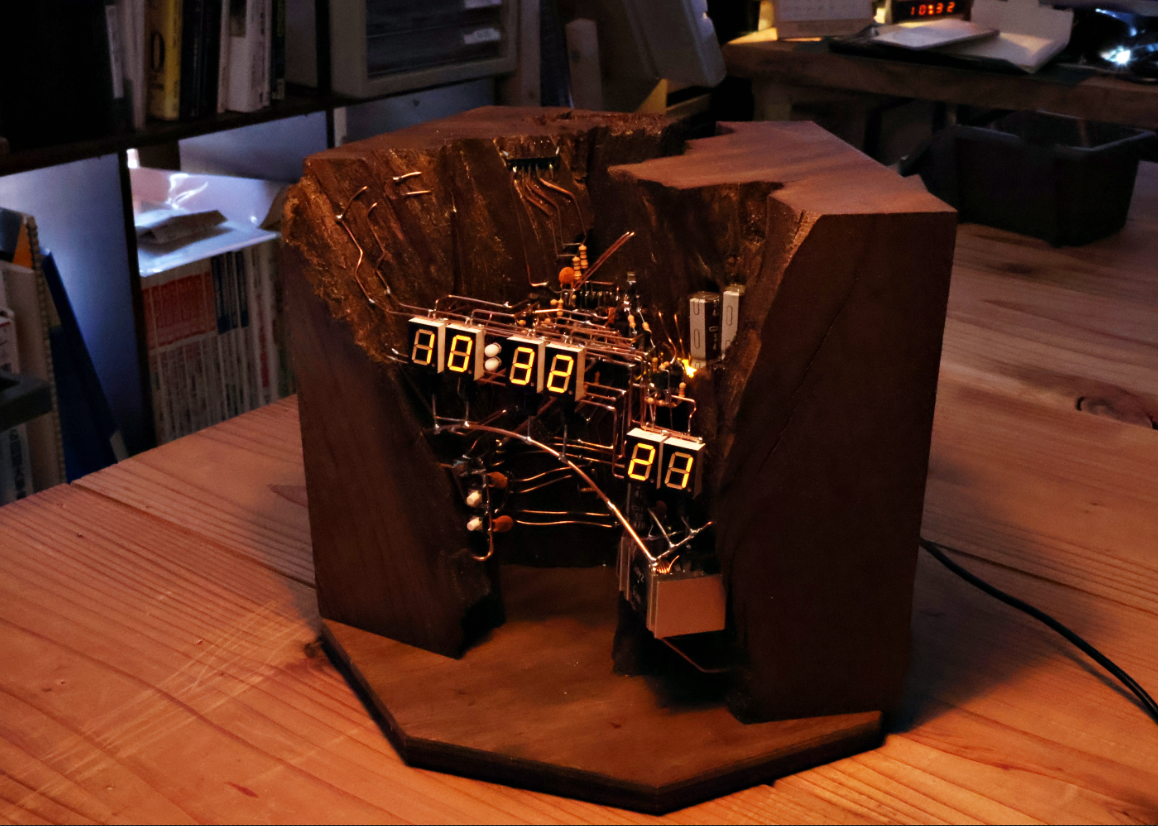
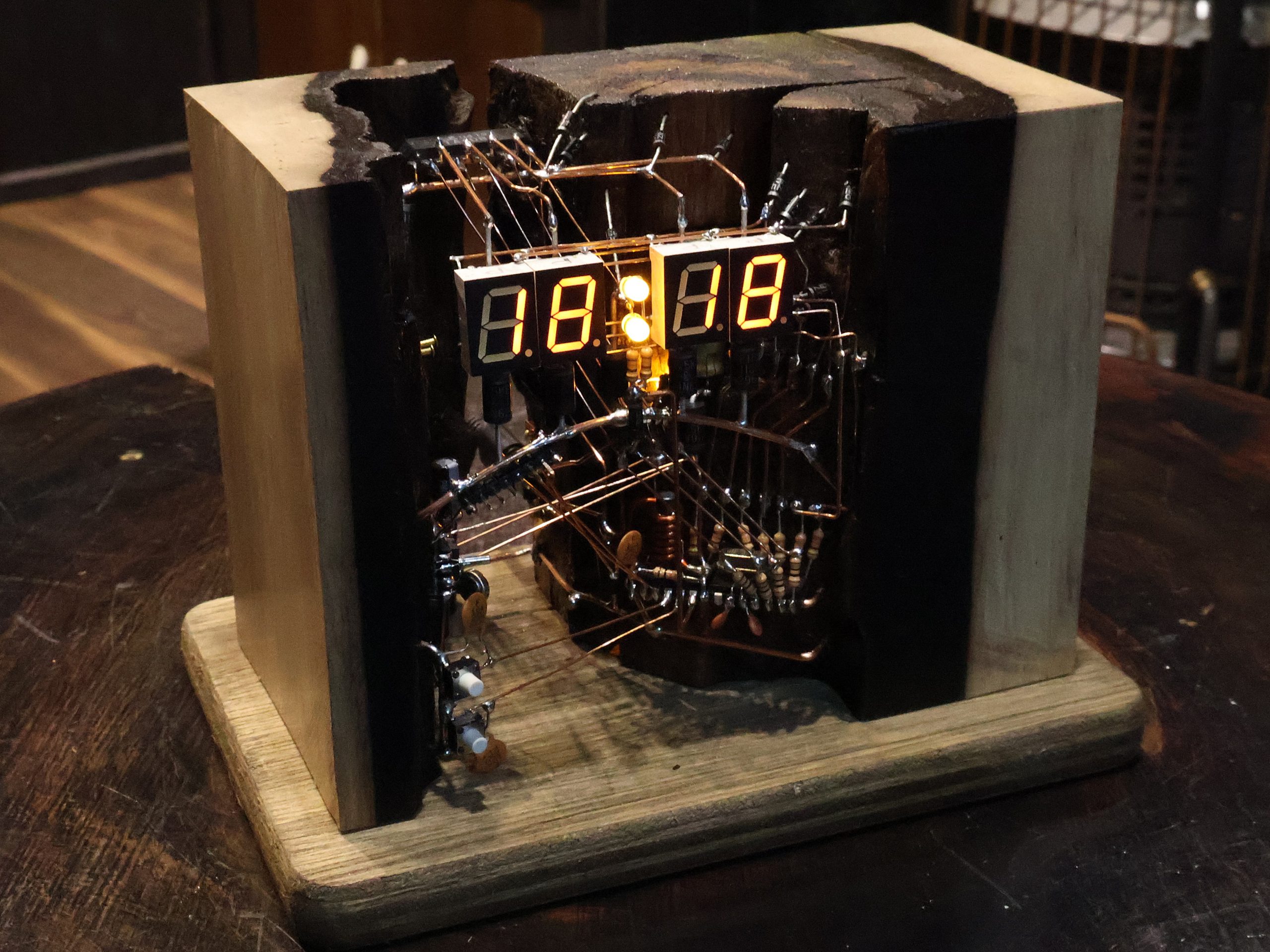
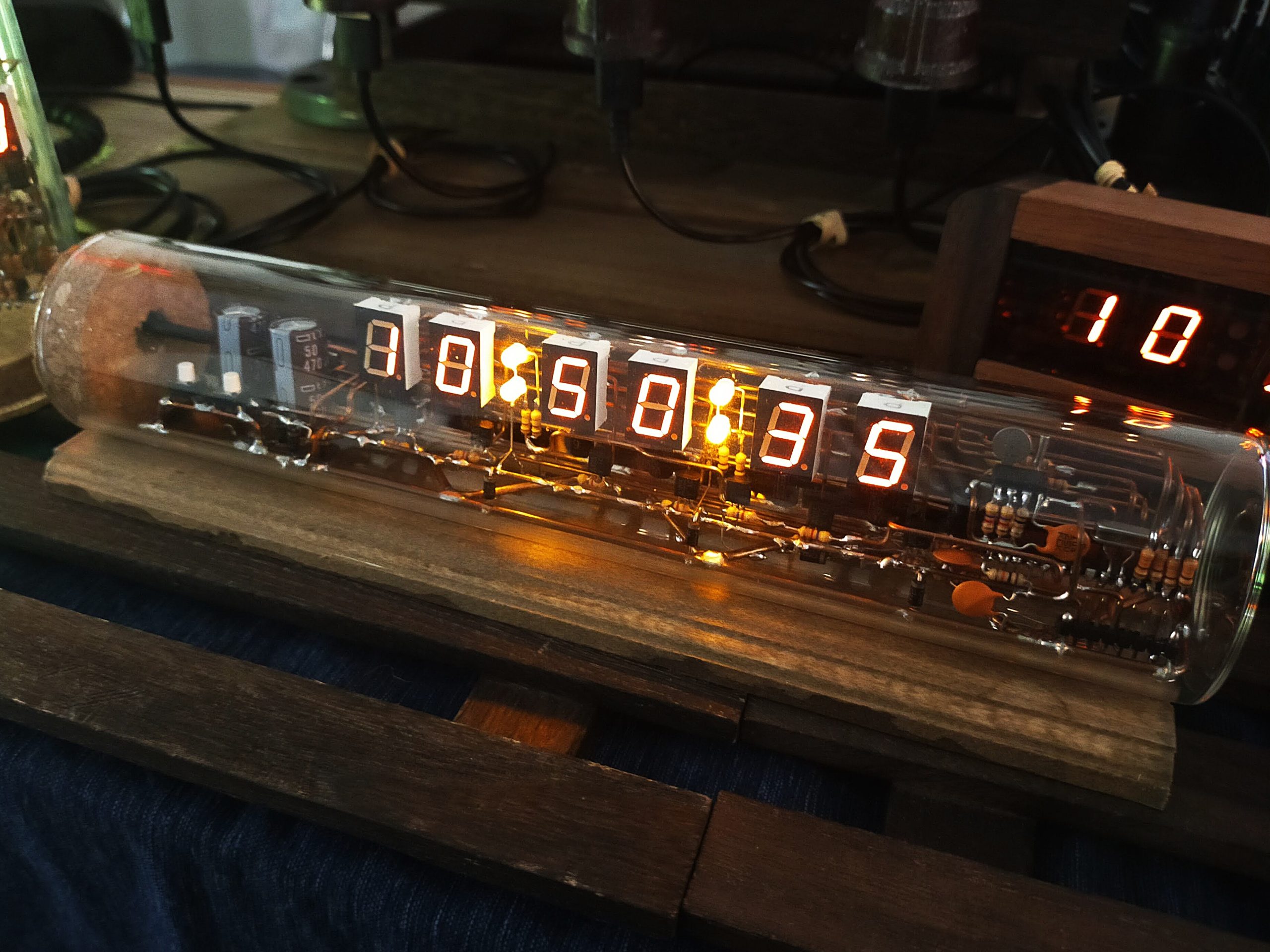
Jindai Zelkova is buried wood from Zelkova trees that remained buried in soil or water for hundreds to thousands of years without decaying, emerging into the modern era. Characterized by its unique greenish-gray or deep grayish-brown hues, this rare, ultra-premium timber captivates with its unmatched color palette and fine grain pattern. It is highly prized for table tops and crafts. We joined two pieces of this precious wood to create a large valley evoking ancient history. Within this valley, we incorporated the mysterious circuitry of a clock, reminiscent of dam construction.
The time is displayed on the orange 7-segment LED in the center. Behind it, the circuitry essential for the clock—including the microcontroller and real-time clock IC—is densely packed. Additionally, the time-setting buttons are located at the bottom right.
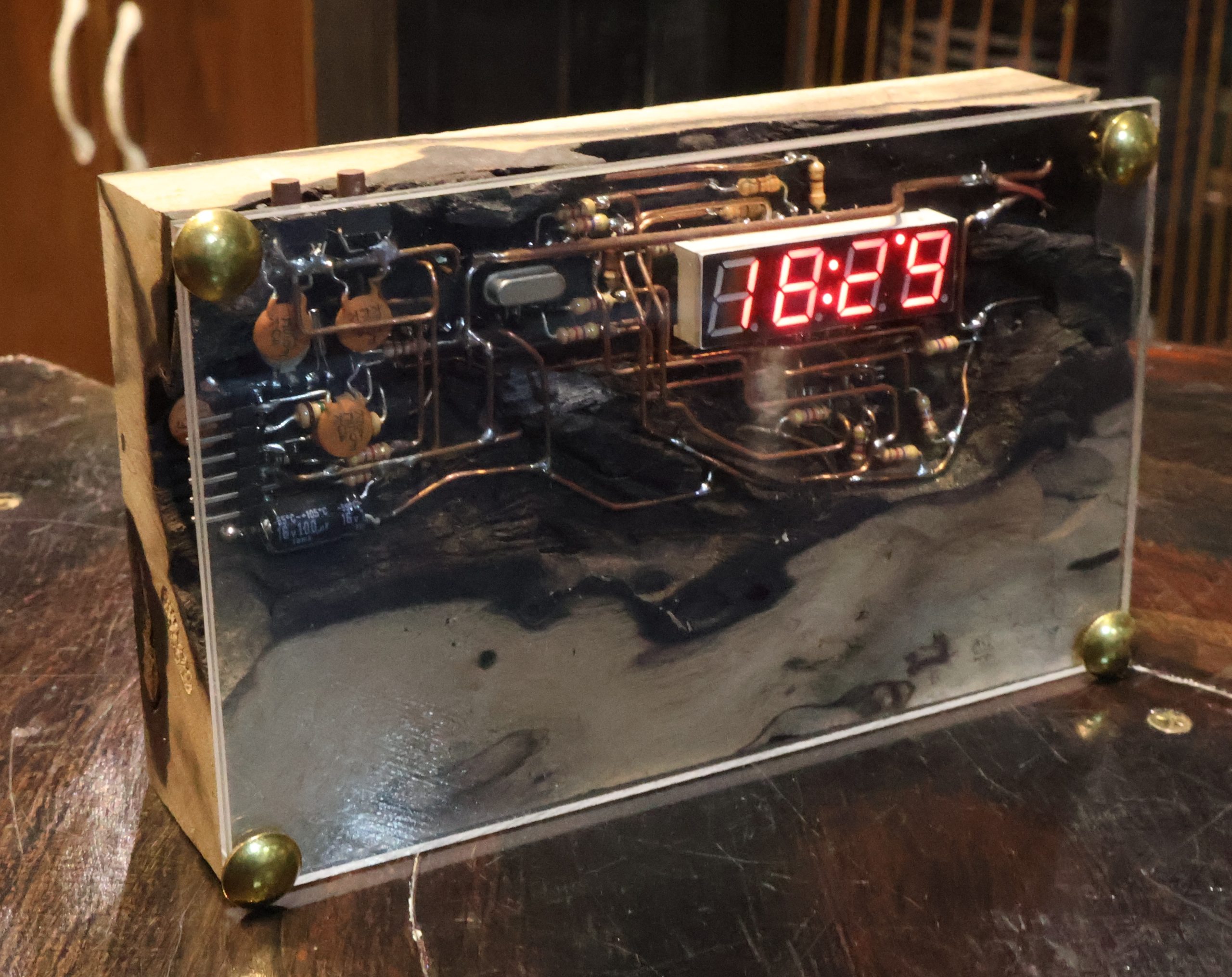
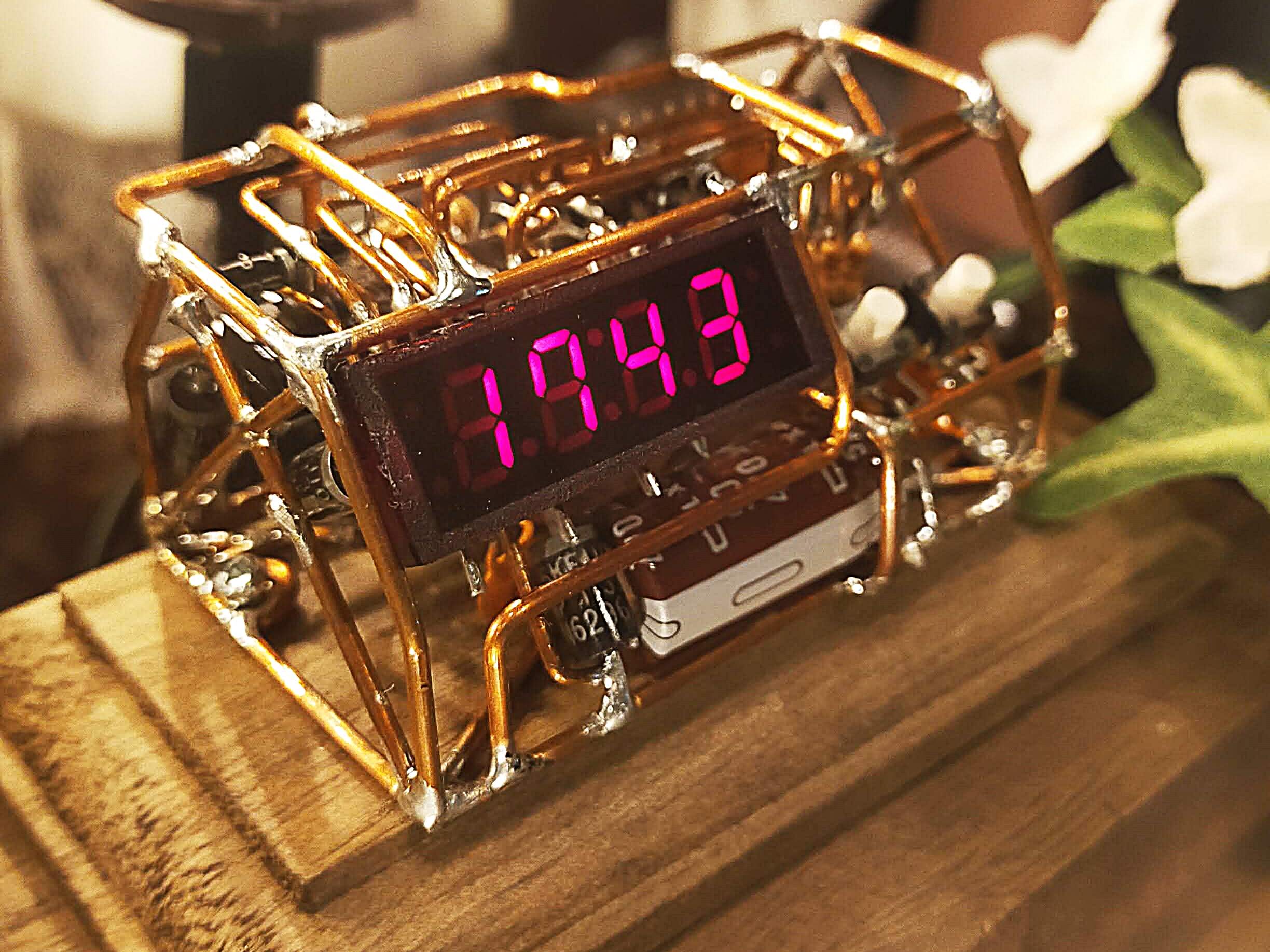
The deep patterns of the black persimmon wood resemble the rugged terrain of Mars’s wilderness. When the clock’s circuitry, constructed with aerial wiring, is housed within it, the circuit activates as a “Mars base” and quietly begins to mark the passage of time. The clock is fully functional and can be set to the correct time.
・素材(Material)
素材には、黒柿の木を使用しました。
土のような黒い層と、砂漠のようなベージュの層で構成され、まさに火星の表面のような木材です。
The material used is black persimmon wood.
Composed of an earthy black layer and a desert-like beige layer, it is wood that truly resembles the surface of Mars.
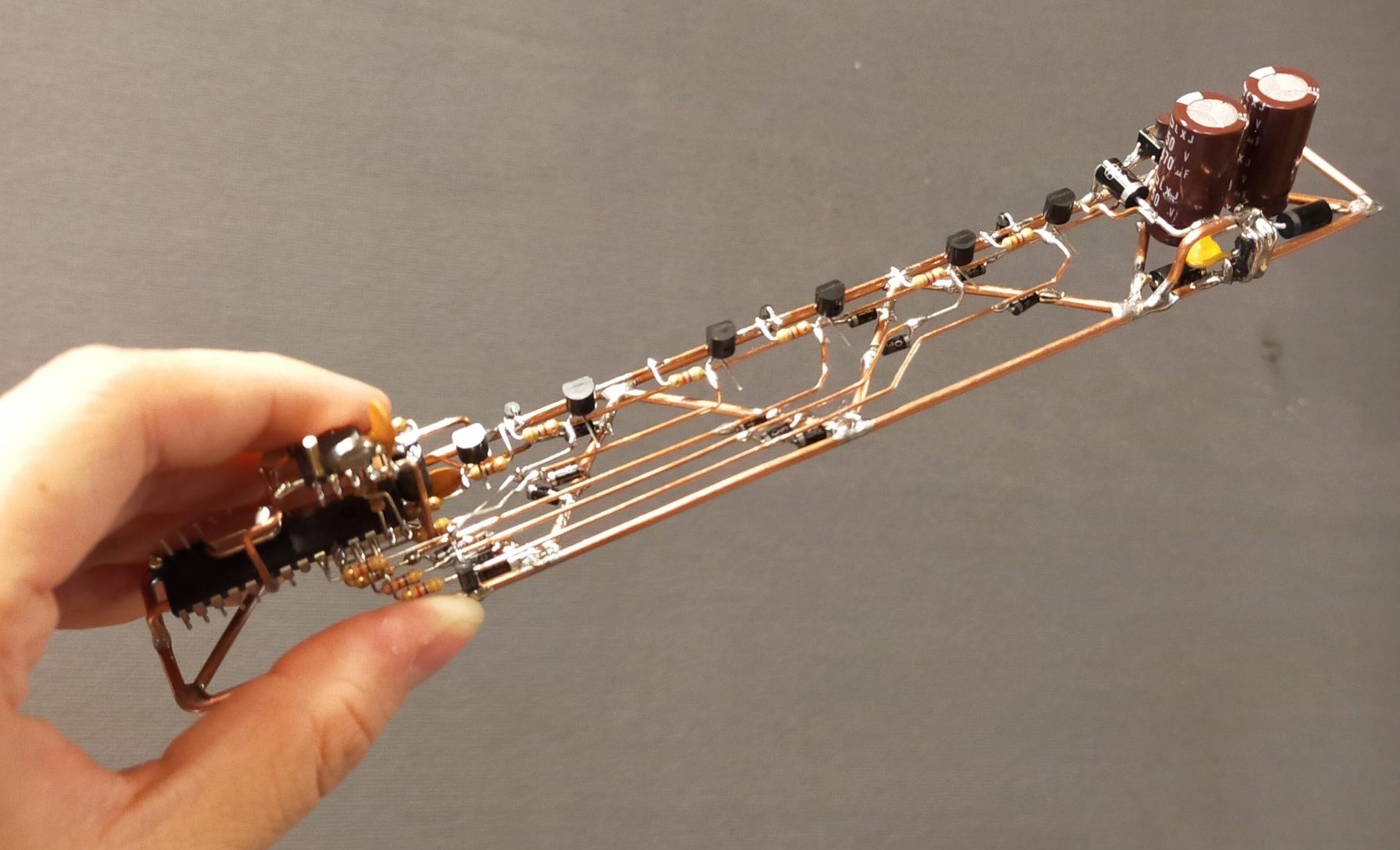
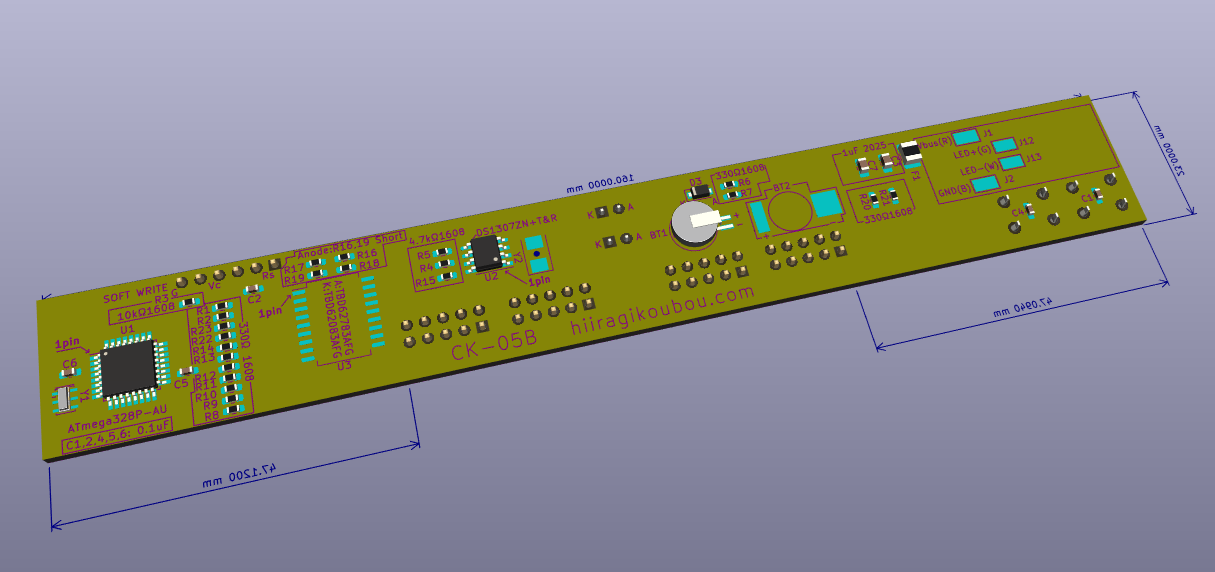
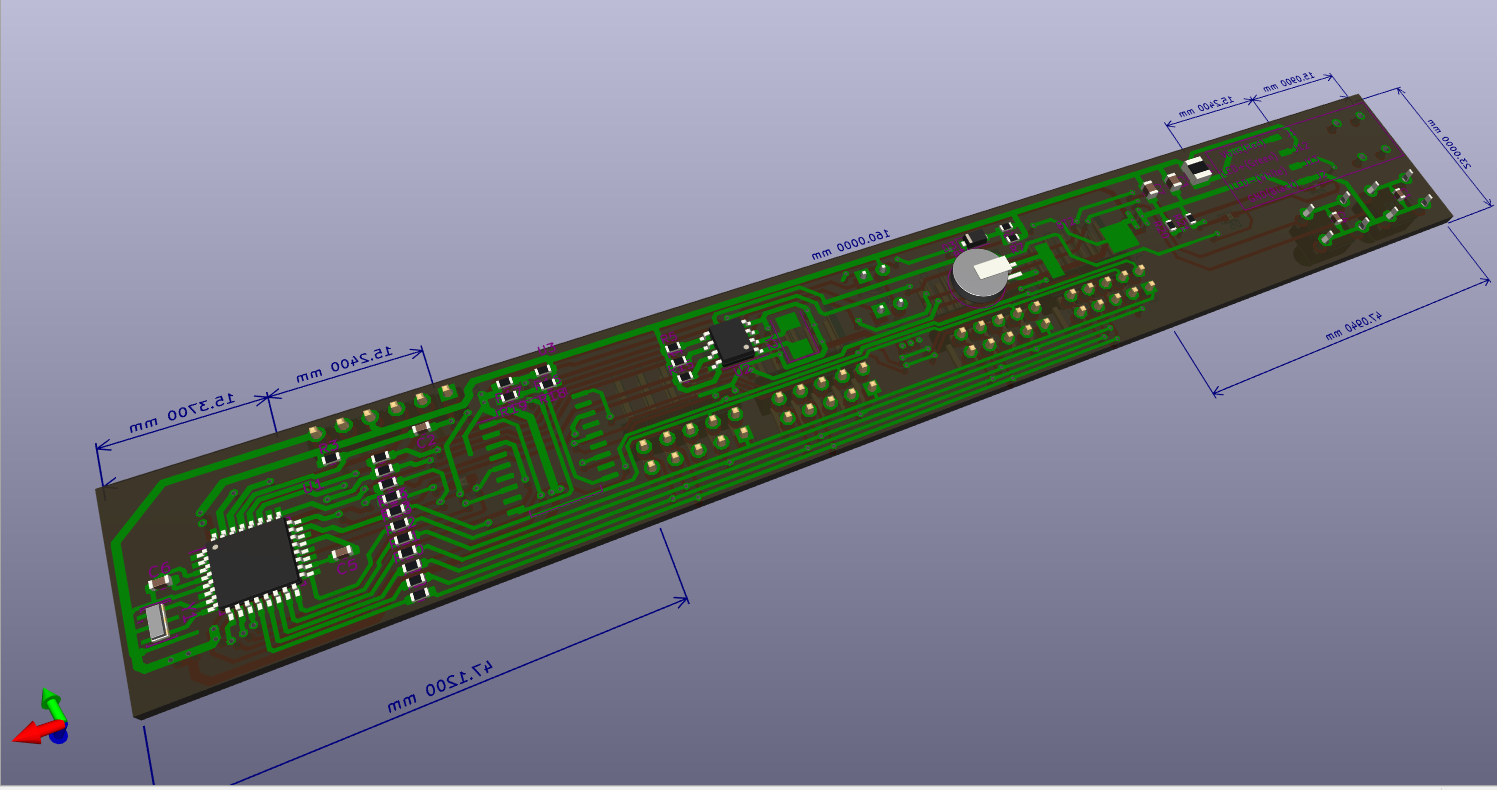
The time display uses a four-digit seven-segment LED in the center. The left side houses the essential clock circuitry, including the microcontroller (the brain) and real-time clock IC. Additionally, the time-setting buttons are located at the top left.
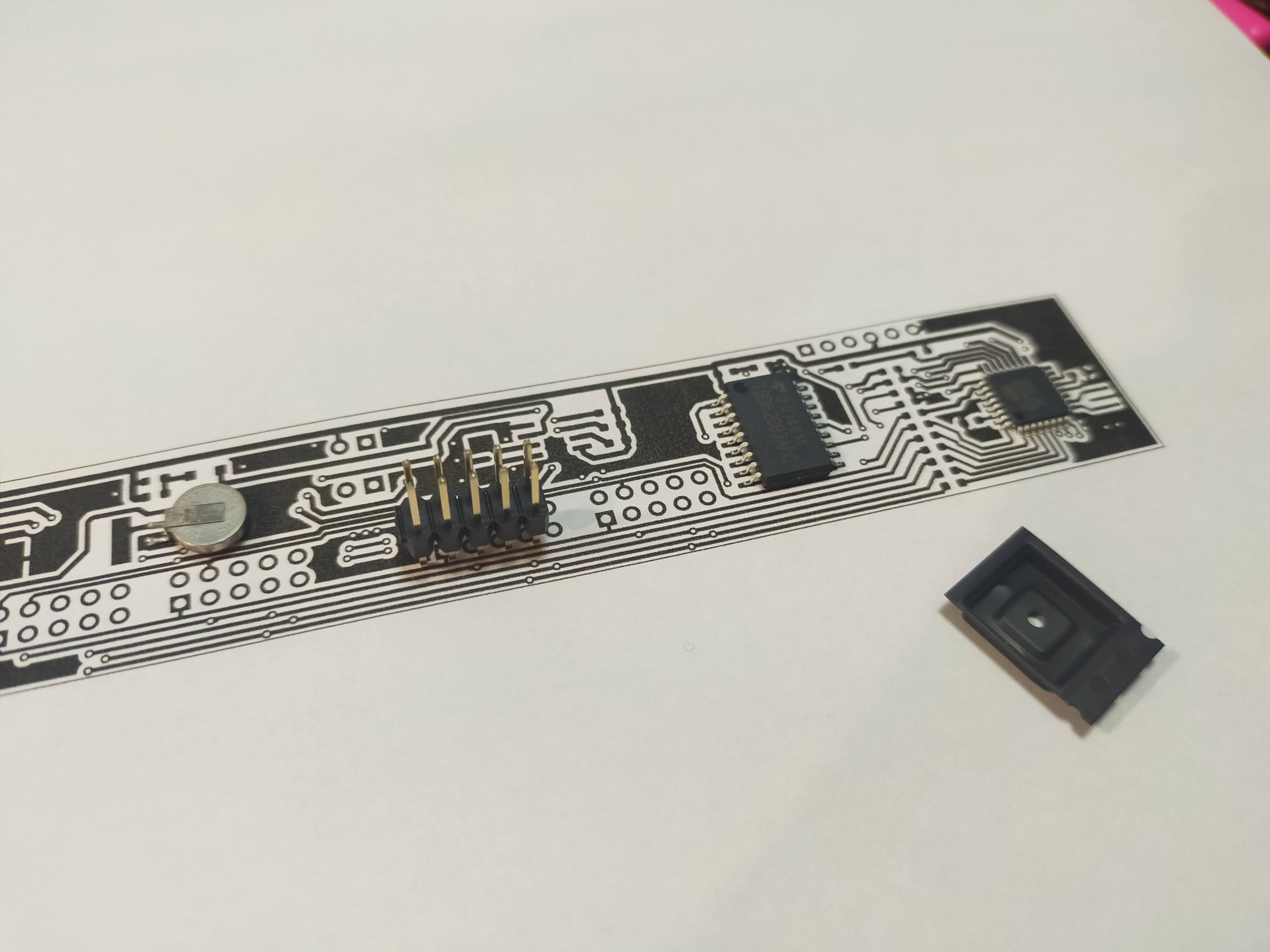
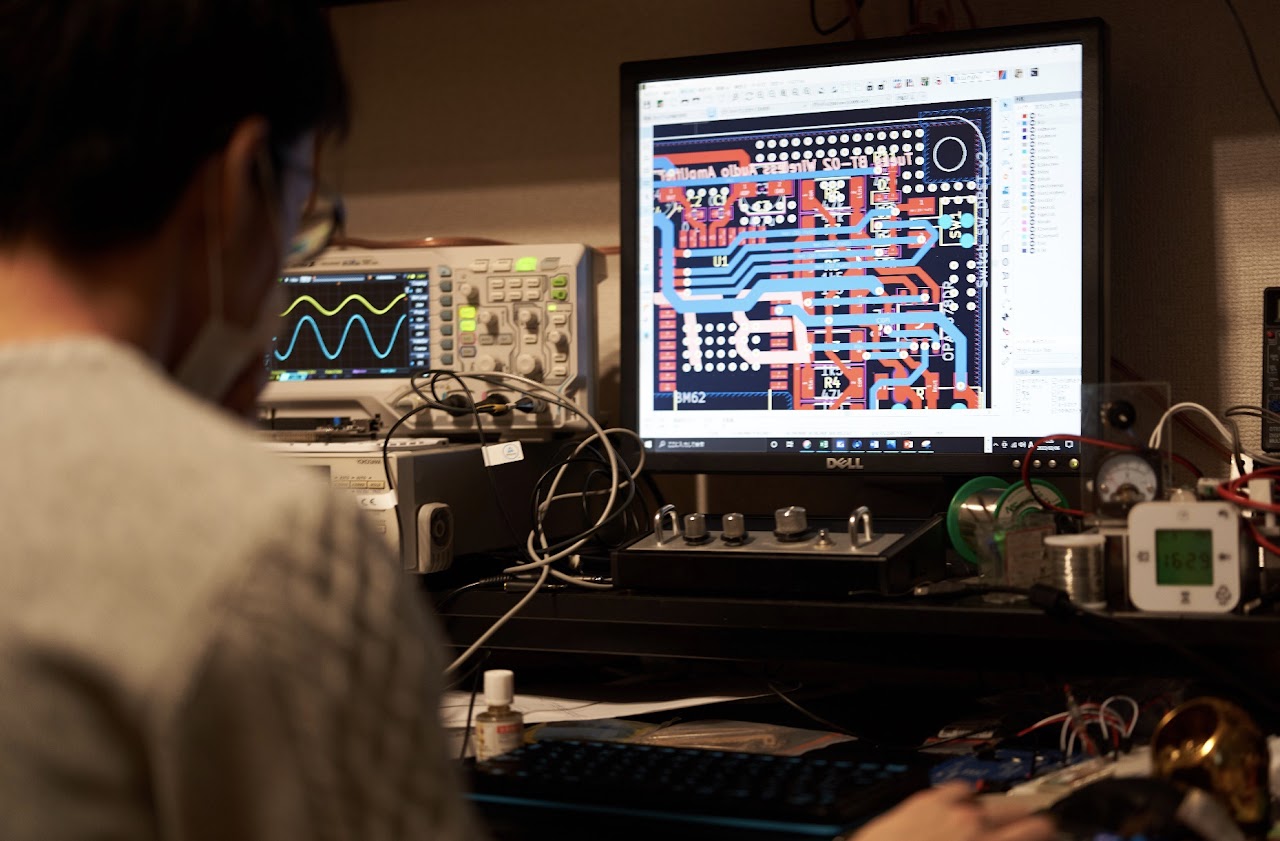
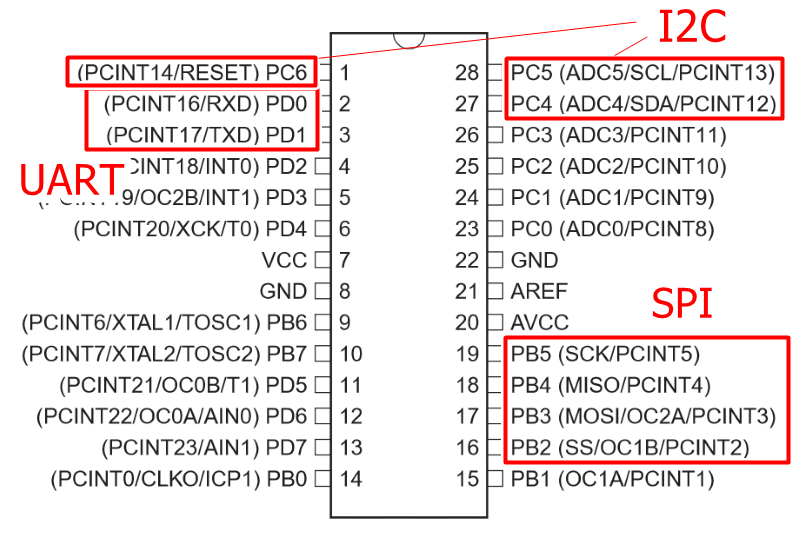
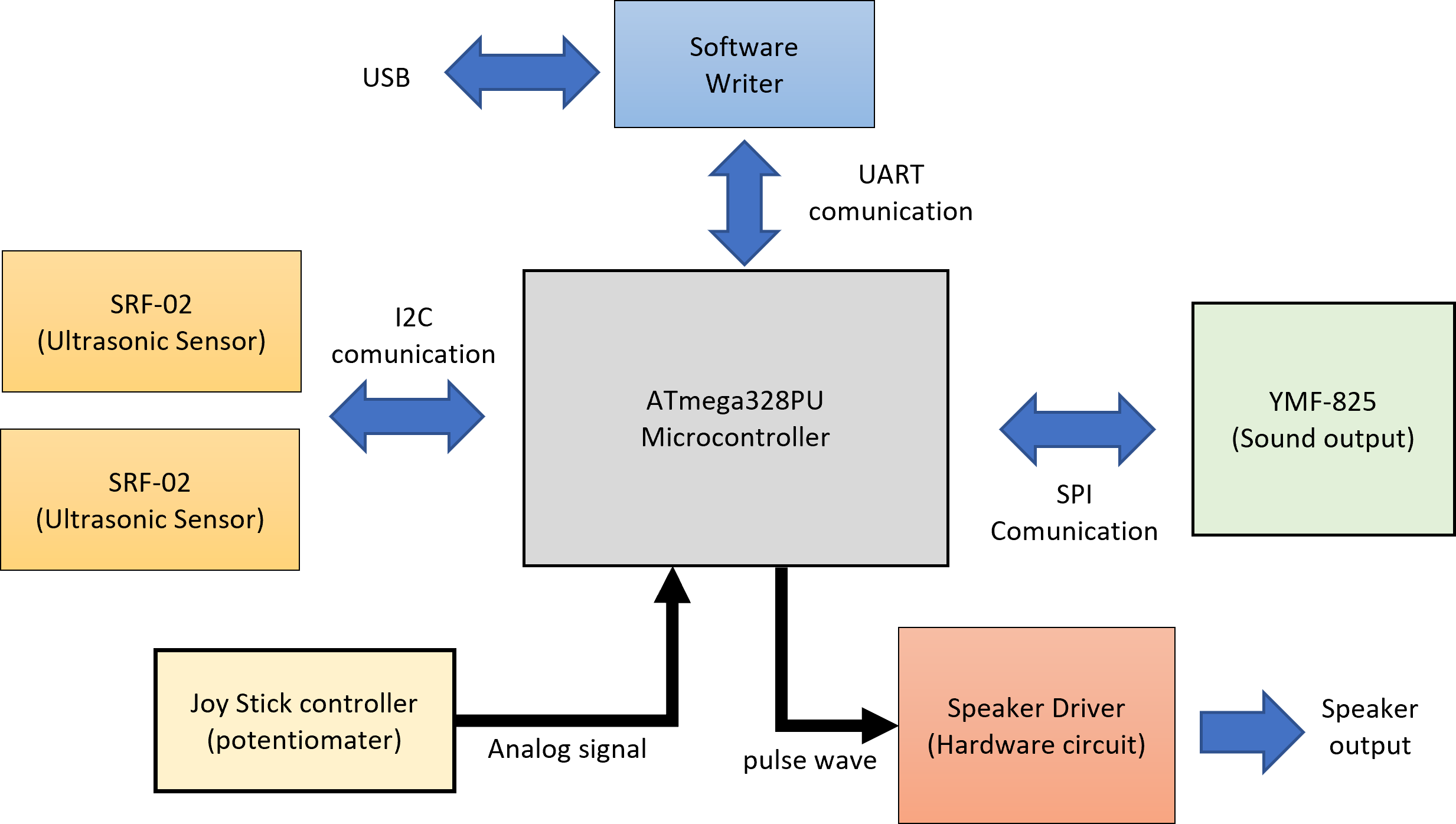
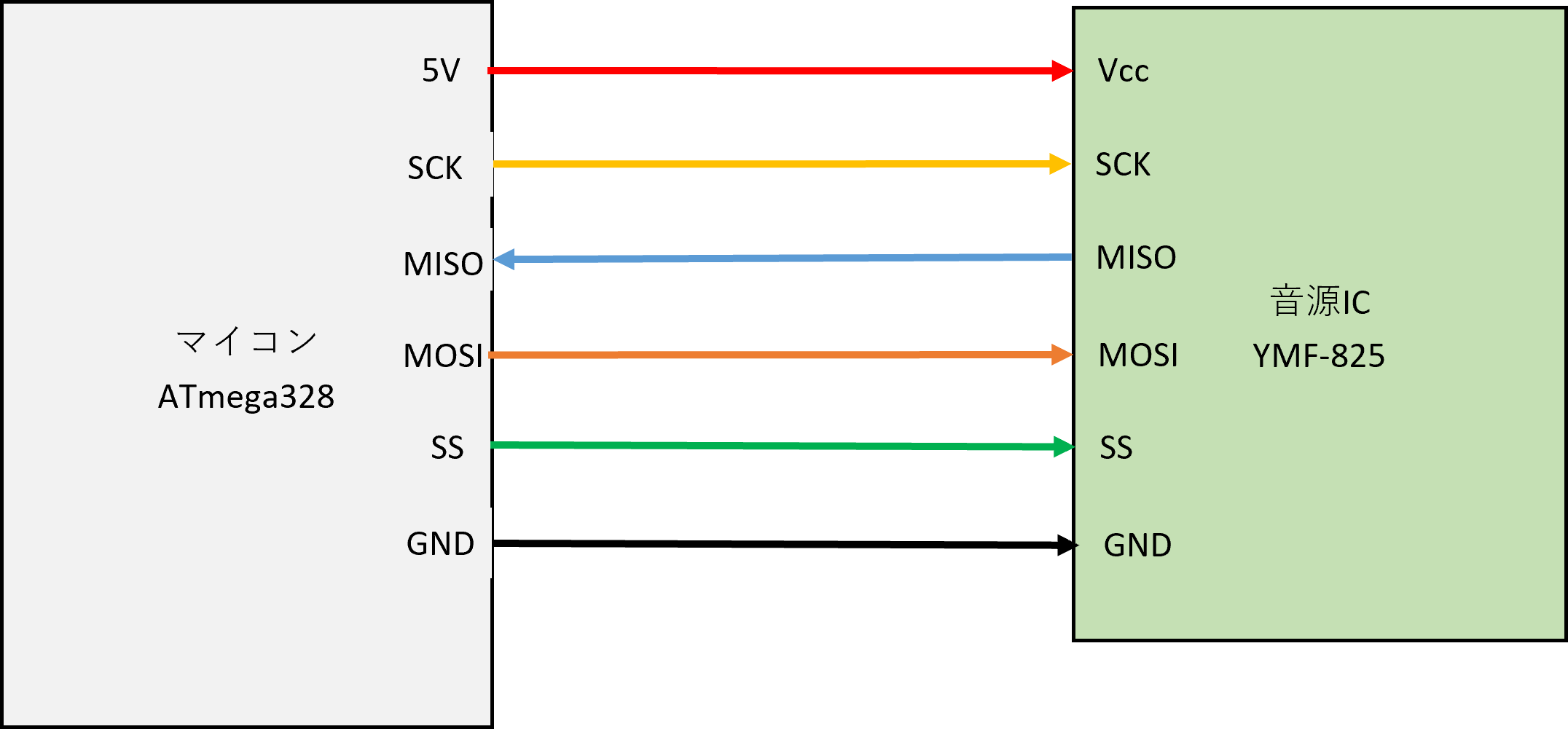
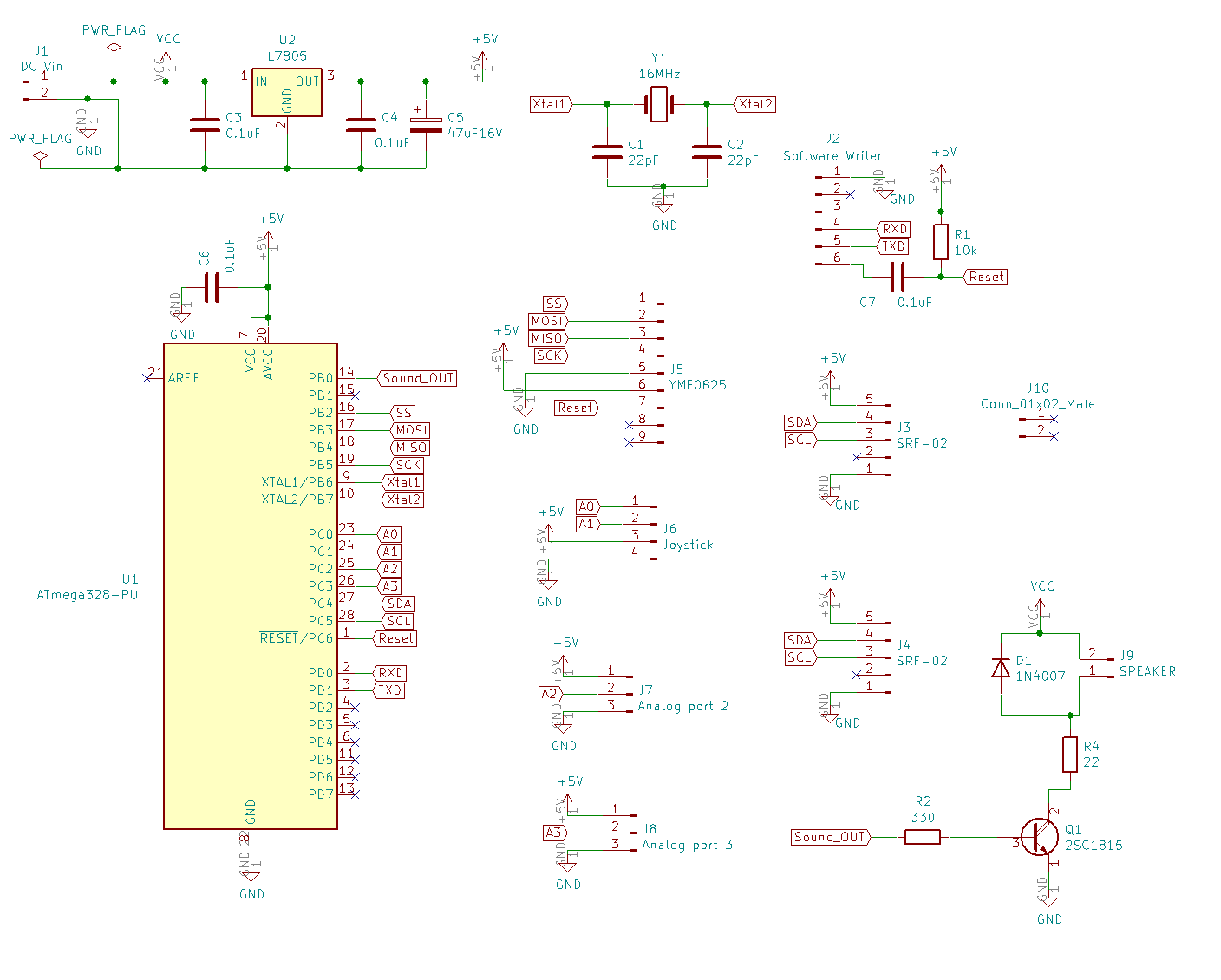
SPIの通信は、音源IC(Slave)とマイコン(Master)にそれぞれあるVcc,GNDの電源端子、同期クロックのSCKと接続対象のSlaveを選択するSS(Slave Select)、MasterからSlaveに信号を送るMOSI(Master Out Slave In)とSlaveからMasterに信号を送るMISO(Master In Slave Out)があり、合計6本の線で構成されます。