前回のつづきです。
今回は、YMF-825のサンプルスケッチを用いて、様々な音を鳴らします。
サンプルスケッチは、GitHubに上がっていました。
下記を参考にしてください。
YMF-825サンプルスケッチ
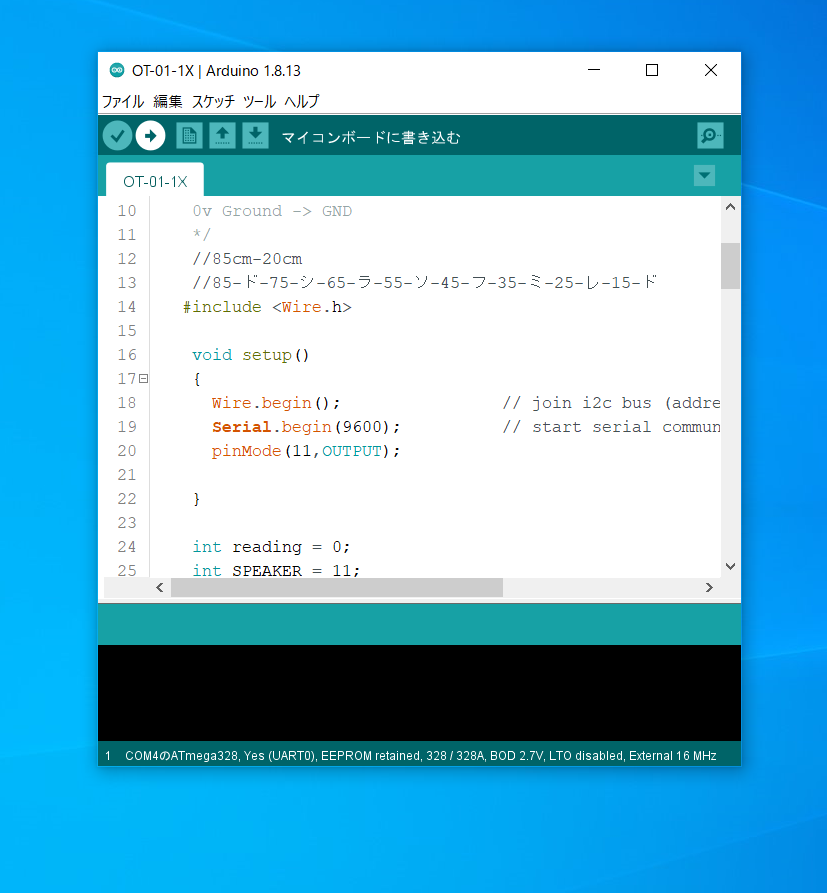
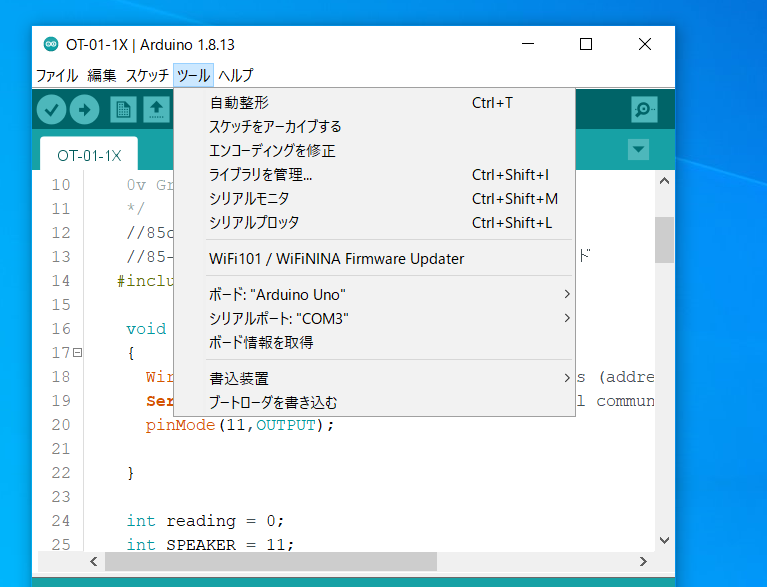
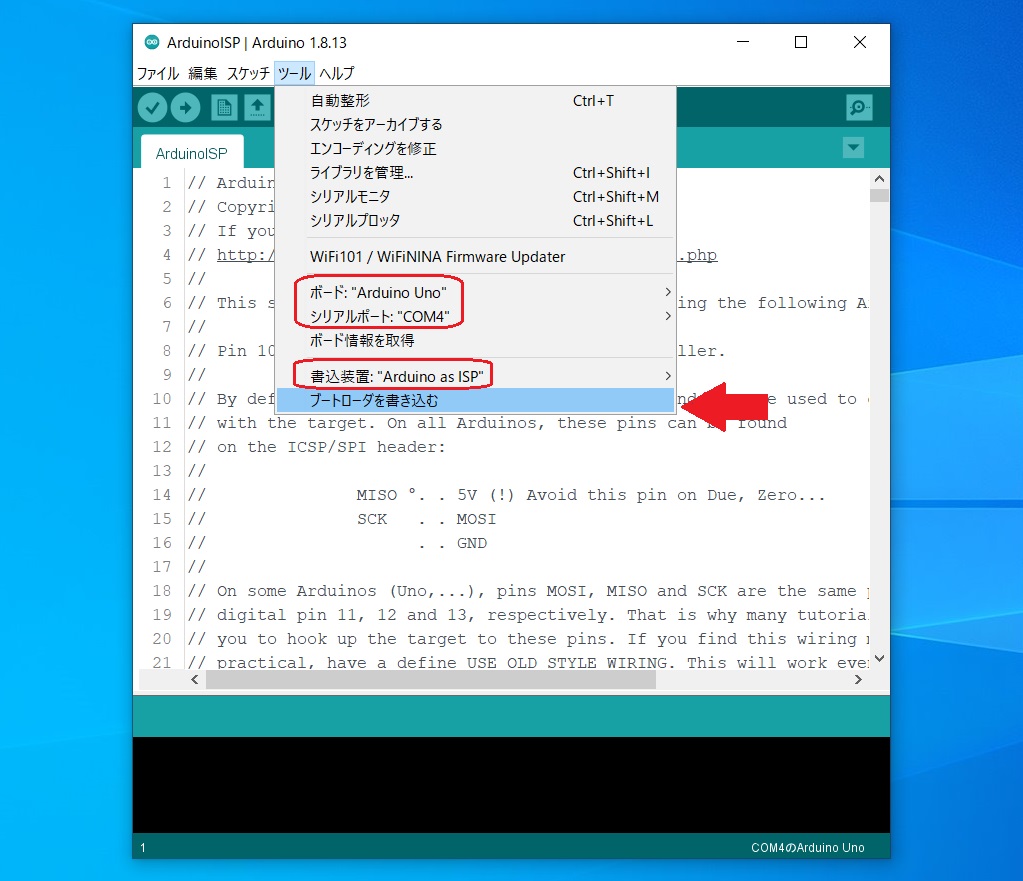
このサンプルスケッチをArduinoNanoに書き込みます。
GitHubのフォルダーを開くと、下記のようなファイルが入っています。
この中の、sample1のプログラムを今回はいじります。
sample1のプログラムはこんな感じです。
/*
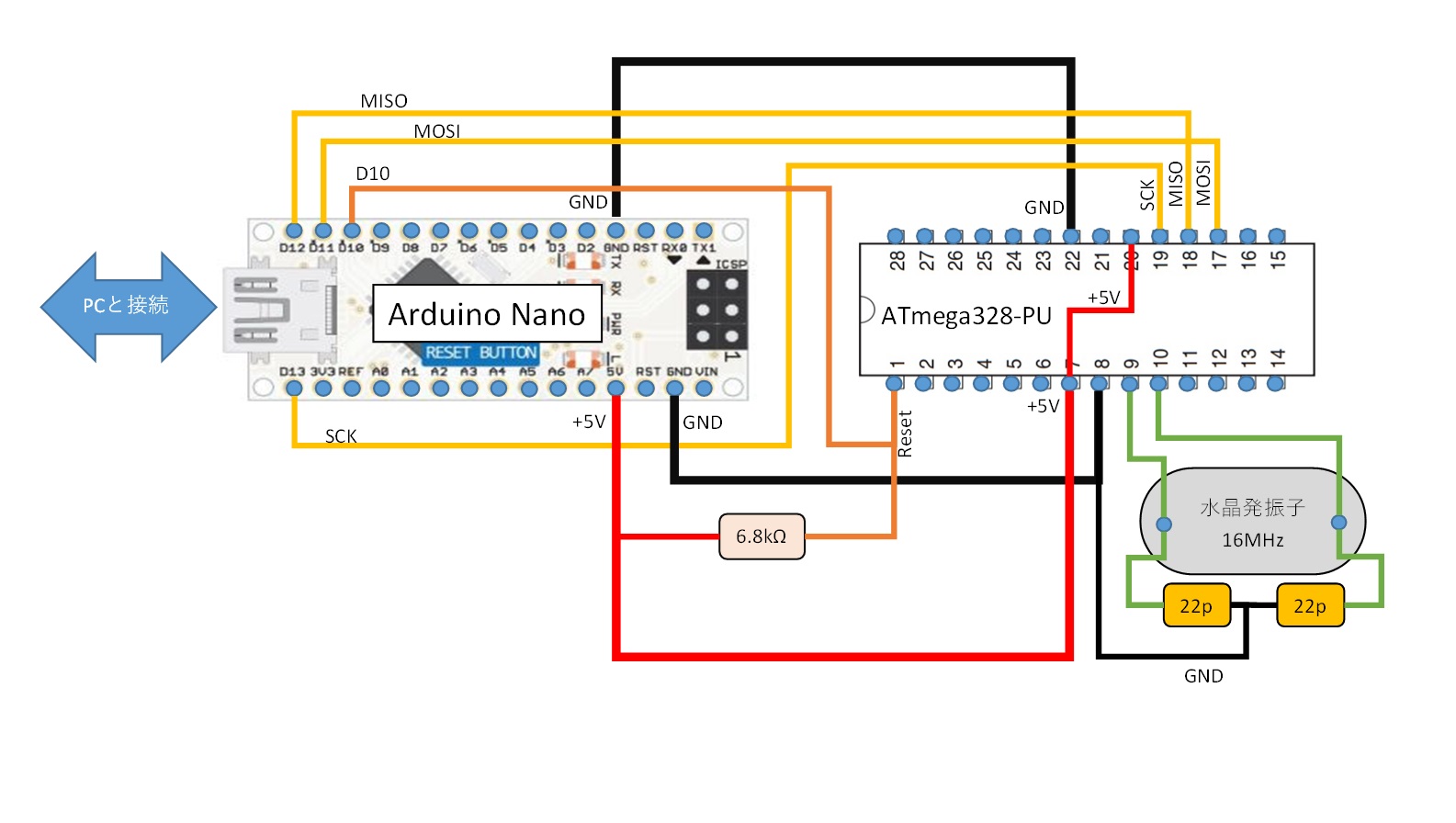
Conditions only for Arduino UNO
RST_N- Pin9
SS - Pin10
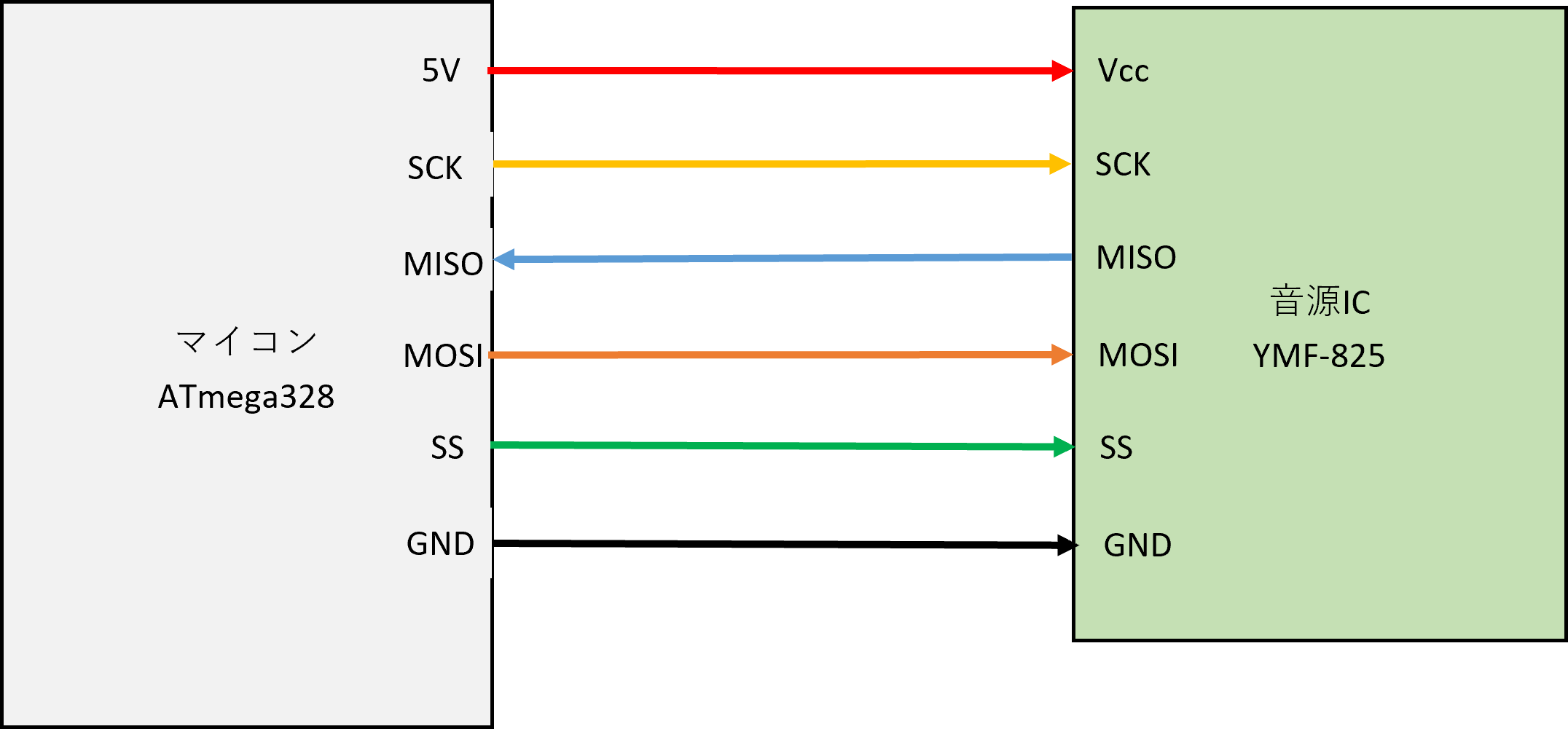
MOSI - Pin11
MISO - Pin12
SCK - Pin13
*/
#include <SPI.h>
//0 :5V 1:3.3V
#define OUTPUT_power 0
// only for Arduino UNO
void set_ss_pin(int val) {
if(val ==HIGH) PORTB |= (4);
else PORTB &= ~(4);
}
// only for Arduino UNO
void set_rst_pin(int val) {
if(val ==HIGH) PORTB |= (2);
else PORTB &= ~(2);
}
void if_write(char addr,unsigned char* data,char num){
char i;
char snd;
set_ss_pin(LOW);
SPI.transfer(addr);
for(i=0;i<num;i++){
SPI.transfer(data[i]);
}
set_ss_pin(HIGH);
}
void if_s_write(char addr,unsigned char data){
if_write(addr,&data,1);
}
unsigned char if_s_read(char addr){
unsigned char rcv;
set_ss_pin(LOW);
SPI.transfer(0x80|addr);
rcv = SPI.transfer(0x00);
set_ss_pin(HIGH);
return rcv;
}
void init_825(void) {
set_rst_pin(LOW);
delay(1);
set_rst_pin(HIGH);
if_s_write( 0x1D, OUTPUT_power );
if_s_write( 0x02, 0x0E );
delay(1);
if_s_write( 0x00, 0x01 );//CLKEN
if_s_write( 0x01, 0x00 ); //AKRST
if_s_write( 0x1A, 0xA3 );
delay(1);
if_s_write( 0x1A, 0x00 );
delay(30);
if_s_write( 0x02, 0x04 );//AP1,AP3
delay(1);
if_s_write( 0x02, 0x00 );
//add
if_s_write( 0x19, 0xF0 );//MASTER VOL
if_s_write( 0x1B, 0x3F );//interpolation
if_s_write( 0x14, 0x00 );//interpolation
if_s_write( 0x03, 0x01 );//Analog Gain
if_s_write( 0x08, 0xF6 );
delay(21);
if_s_write( 0x08, 0x00 );
if_s_write( 0x09, 0xF8 );
if_s_write( 0x0A, 0x00 );
if_s_write( 0x17, 0x40 );//MS_S
if_s_write( 0x18, 0x00 );
}
void set_tone(void){
unsigned char tone_data[35] ={
0x81,//header
//T_ADR 0
0x01,0x85,
0x00,0x7F,0xF4,0xBB,0x00,0x10,0x40,
0x00,0xAF,0xA0,0x0E,0x03,0x10,0x40,
0x00,0x2F,0xF3,0x9B,0x00,0x20,0x41,
0x00,0xAF,0xA0,0x0E,0x01,0x10,0x40,
0x80,0x03,0x81,0x80,
};
if_s_write( 0x08, 0xF6 );
delay(1);
if_s_write( 0x08, 0x00 );
if_write( 0x07, &tone_data[0], 35 );//write to FIFO
}
void set_ch(void){
if_s_write( 0x0F, 0x30 );// keyon = 0
if_s_write( 0x10, 0x71 );// chvol
if_s_write( 0x11, 0x00 );// XVB
if_s_write( 0x12, 0x08 );// FRAC
if_s_write( 0x13, 0x00 );// FRAC
}
void keyon(unsigned char fnumh, unsigned char fnuml){
if_s_write( 0x0B, 0x00 );//voice num
if_s_write( 0x0C, 0x54 );//vovol
if_s_write( 0x0D, fnumh );//fnum
if_s_write( 0x0E, fnuml );//fnum
if_s_write( 0x0F, 0x40 );//keyon = 1
}
void keyoff(void){
if_s_write( 0x0F, 0x00 );//keyon = 0
}
void setup() {
// put your setup code here, to run once:
pinMode(9,OUTPUT);
pinMode(10,OUTPUT);
set_ss_pin(HIGH);
SPI.setBitOrder(MSBFIRST);
SPI.setClockDivider(SPI_CLOCK_DIV8);
SPI.setDataMode(SPI_MODE0);
SPI.begin();
init_825();
set_tone();
set_ch();
}
void loop() {
// put your main code here, to run repeatedly:
keyon(0x14,0x65);
delay(500);
keyoff();
delay(200);
keyon(0x1c,0x11);
delay(500);
keyoff();
delay(200);
keyon(0x1c,0x42);
delay(500);
keyoff();
delay(200);
keyon(0x1c,0x5d);
delay(500);
keyoff();
delay(200);
keyon(0x24,0x17);
delay(500);
keyoff();
delay(200);
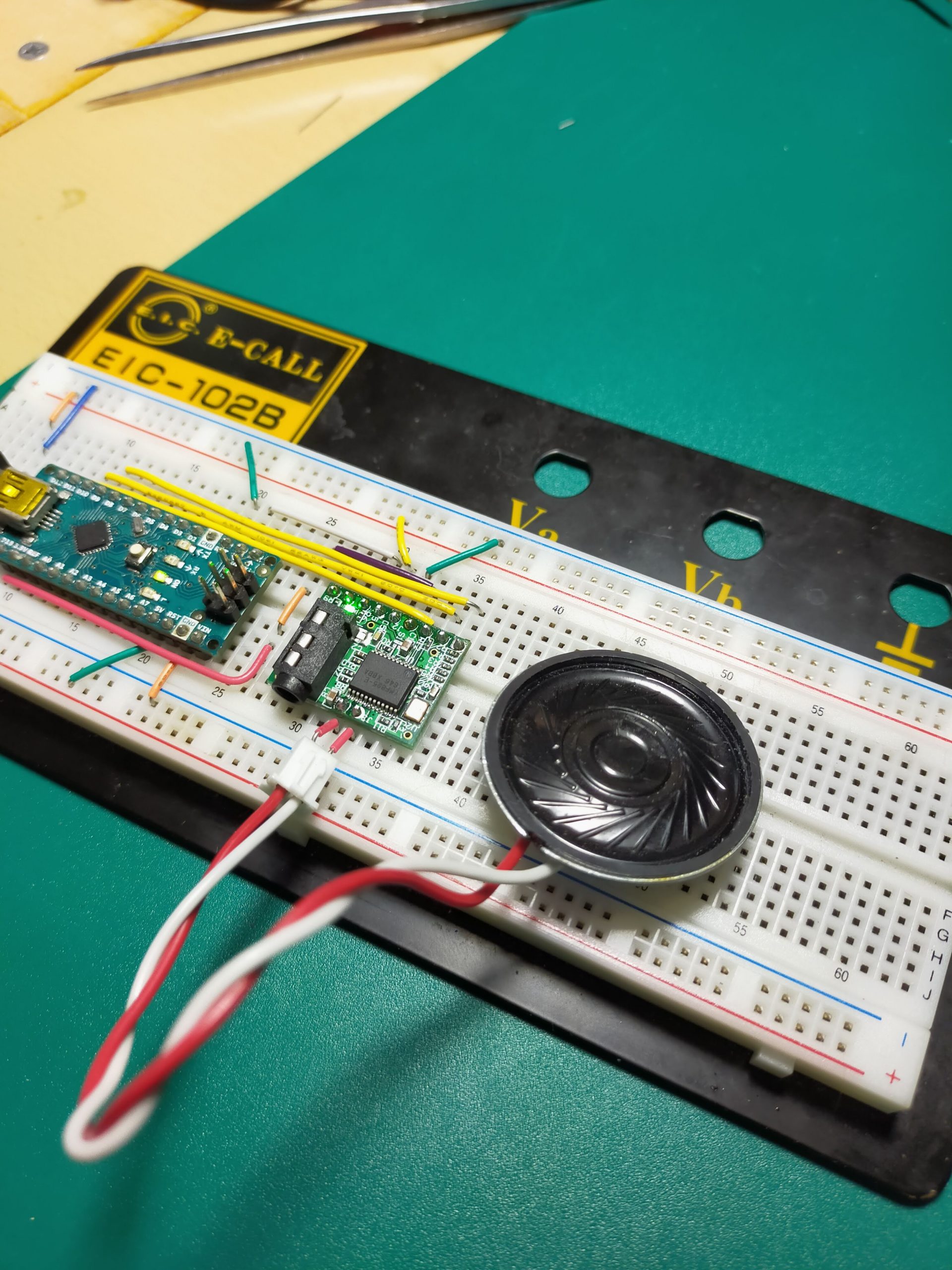
}正直、よくわからなかったので早速書込んでみました。
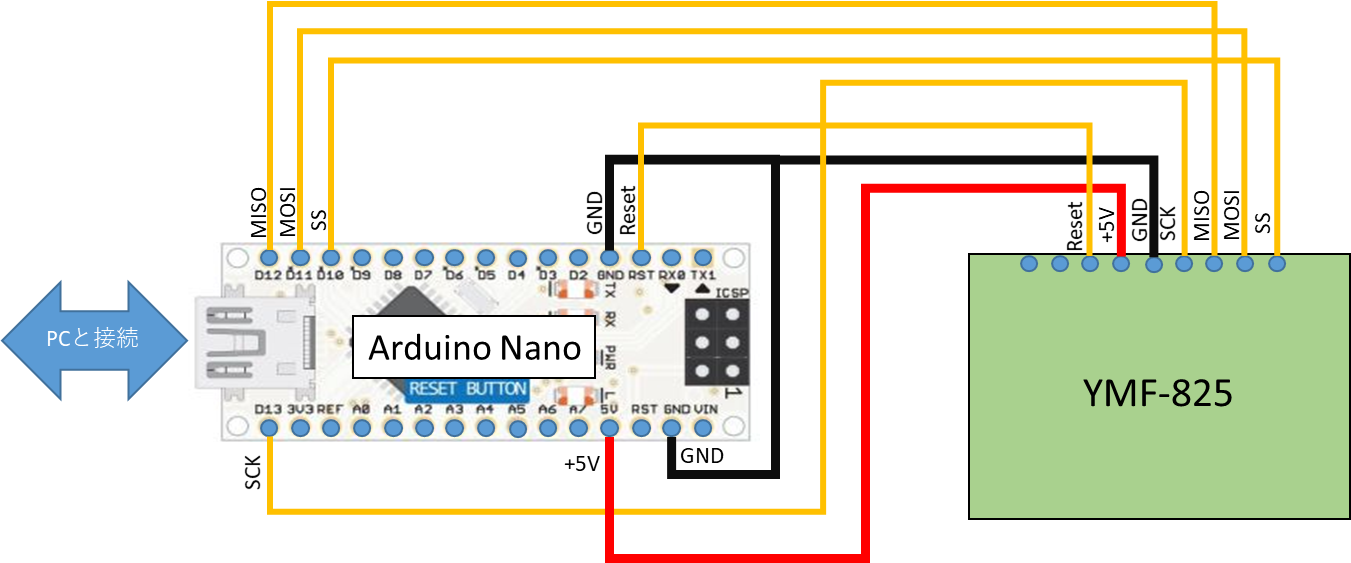
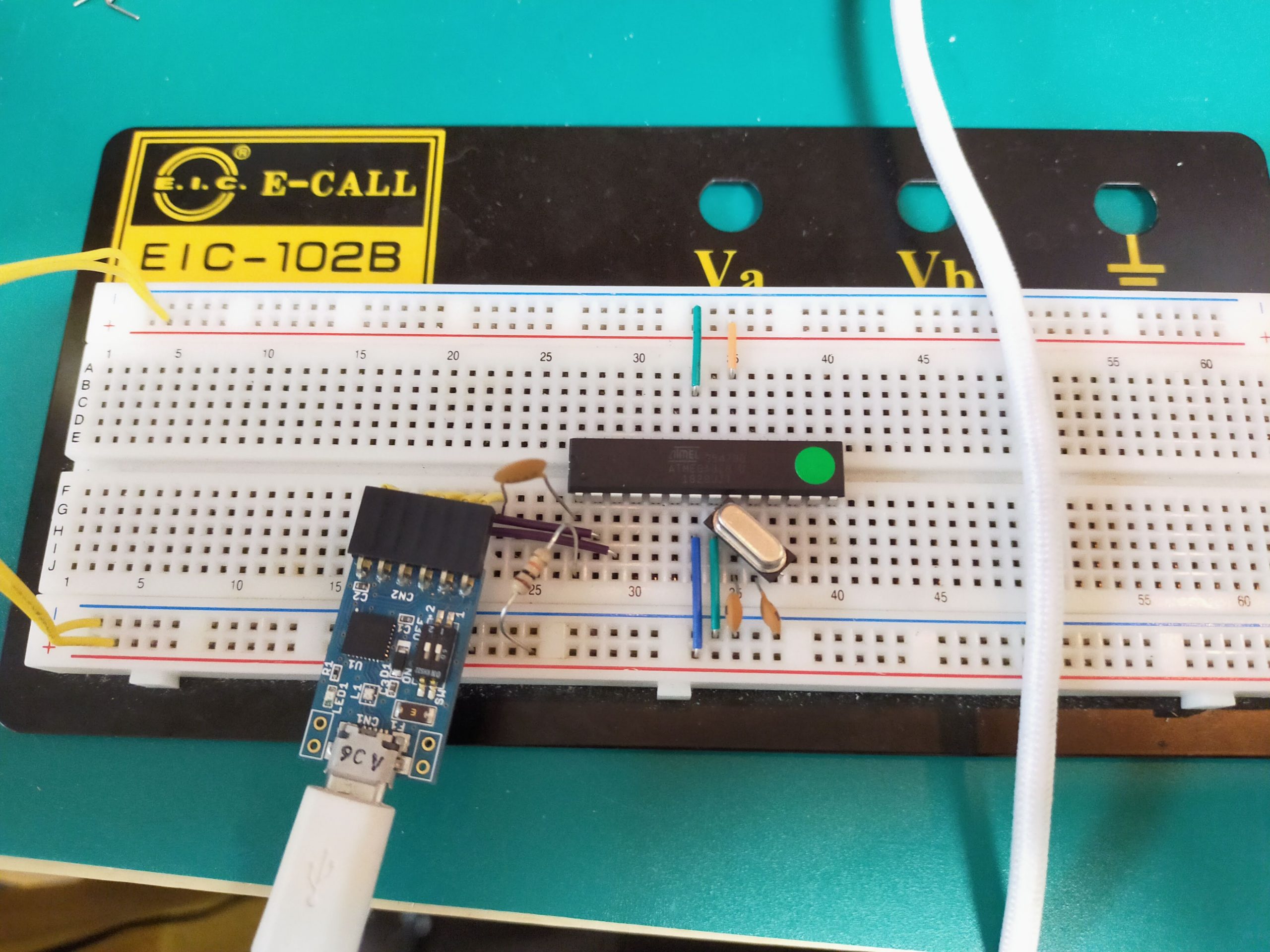
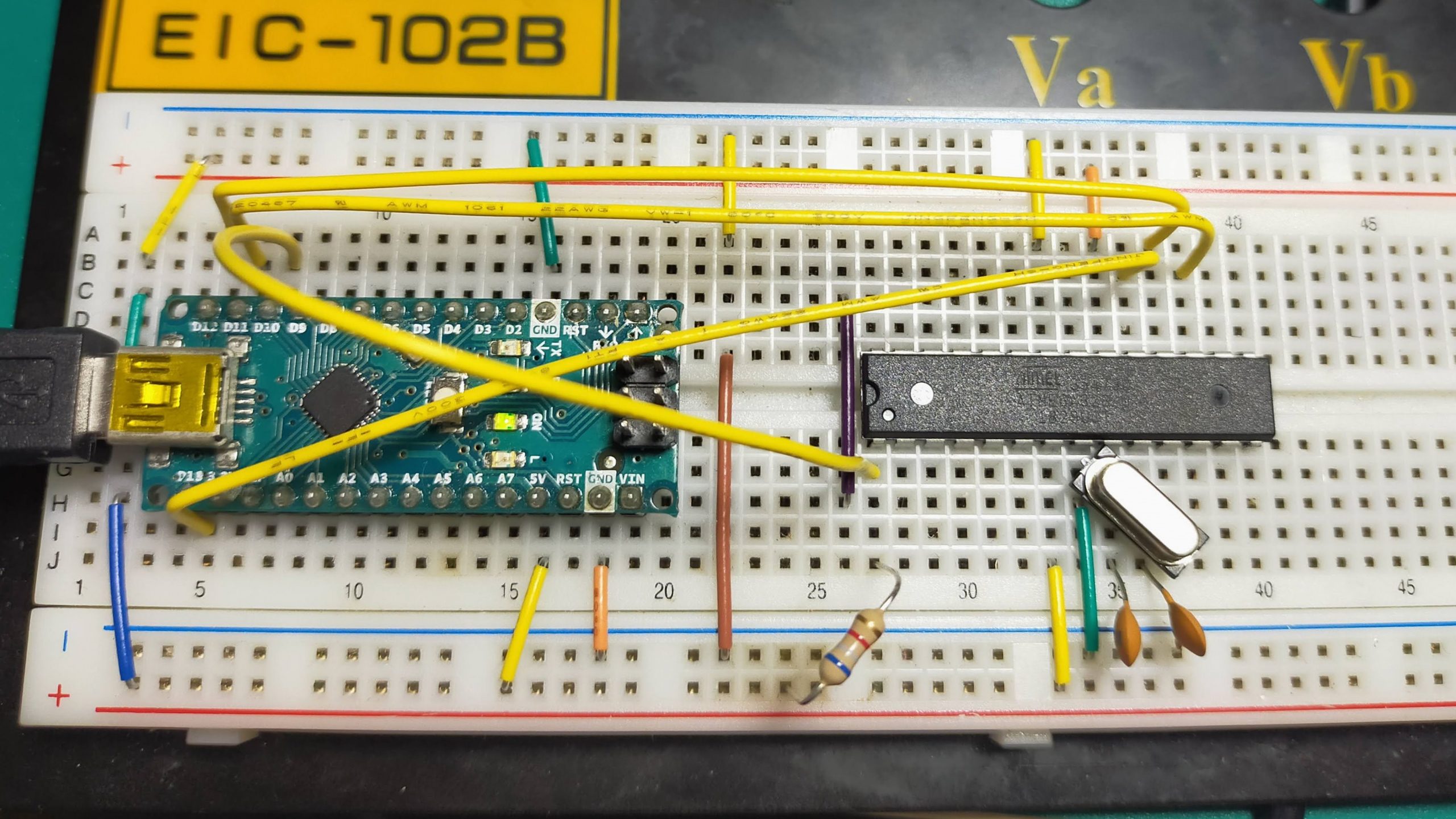
なおスピーカーは、YMF-825のSPに直接繋ぎます。
実際の動作が下記の動画になります。
VIDEO
ド、レ、ミ、フぁ、ソまでをずっと繰り返しているようです。
どうやら、このプログラムの一番下の、void loop内の処理で音階を演奏しているみたいですね。
void loop() {
// put your main code here, to run repeatedly:
keyon(0x14,0x65); //ド
delay(500);
keyoff();
delay(200);
keyon(0x1c,0x11); //レ
delay(500);
keyoff();
delay(200);
keyon(0x1c,0x42); //ミ
delay(500);
keyoff();
delay(200);
keyon(0x1c,0x5d); //ファ
delay(500);
keyoff();
delay(200);
keyon(0x24,0x17); //ソ
delay(500);
keyoff();
delay(200);
}
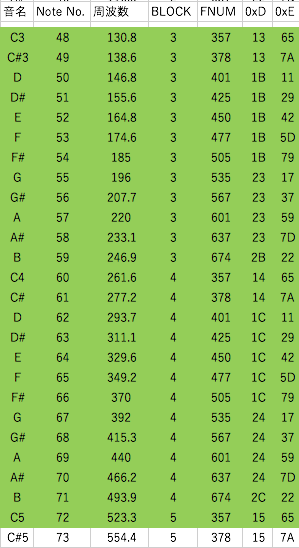
この、keyonの中の16進数の数時(0x14,0x65)が音階を決めているようです。でも、数字に連続性もないし、10進数に変換しても、周波数ではなさそう。
いろいろ調べてみたところ、しくみはよくわかりませんでしたが、EguchiKazuyuki様のQiitaのブログにて、ここに書き込む音階のデータが示されていました。これもデータが必ずしも正確とは限らないそうなので、参照はあくまで自己責任でおねがいします。
YMF825の音階パラメータについてhttps://qiita.com/KazuyukiEguchi/items/8e7192a0114250f8898f
なので、音階は取り合えずここから参照すれば使えそうです。(大変感謝申し上げます)
次に、音色です。
設定次第で、様々な音を出せるようで、ピアノ、ギターなど自由に作れます。
サンプルコード内の、void set_toneの中の、tonedata[35]の配列の数字で決めています。
void set_tone(void){
unsigned char tone_data[35] ={
0x81,//header
//T_ADR 0
0x01,0x85,
0x00,0x7F,0xF4,0xBB,0x00,0x10,0x40,
0x00,0xAF,0xA0,0x0E,0x03,0x10,0x40,
0x00,0x2F,0xF3,0x9B,0x00,0x20,0x41,
0x00,0xAF,0xA0,0x0E,0x01,0x10,0x40,
0x80,0x03,0x81,0x80,
};
if_s_write( 0x08, 0xF6 );
delay(1);
if_s_write( 0x08, 0x00 );
if_write( 0x07, &tone_data[0], 35 );//write to FIFO
}
この配列を変えることで音色を変更できそうです。
音色のサンプルスケッチは、Himagine様のブログを参考にさせていただきました。
ヤマハ提供サンプル(2)https://sites.google.com/site/himagine201206/home/arduino/ymf825/030
下記に転載させていただきます。感謝申し上げます。
変換済 tonedata.txt
/*
// GrandPiano
0x01,0x43, // modify BO:0 -> BO:1
0x00,0x67,0xFF,0x9D,0x00,0x10,0x40,
0x21,0x33,0xE2,0xA3,0x00,0x50,0x00,
0x10,0x41,0xD3,0x88,0x01,0x10,0x00,
0x21,0x62,0xD4,0x02,0x01,0x10,0x00,
*/
/*
// E.Piano
0x01,0x45, // modify BO:0 -> BO:1
0x51,0xC4,0xFB,0x8C,0x44,0x70,0x95,
0x10,0x82,0xFF,0x12,0x45,0x10,0x00,
0x11,0xB0,0xF1,0x49,0x44,0x10,0x02,
0x11,0x72,0xFF,0x10,0x41,0x10,0x00,
*/
/*
// TenorSax
0x01,0x45, // modify BO:0 -> BO:1
0x01,0x03,0x70,0x16,0x44,0x10,0x0B,
0x00,0x92,0x70,0x3C,0x43,0x10,0x40,
0x01,0x03,0x70,0x22,0x44,0x10,0x4B,
*/
/*
// PickBass
0x02,0x43, // modify BO:0 -> BO:2
0x21,0x37,0xF1,0x4E,0x44,0x10,0x05,
0x41,0x6B,0xC7,0x54,0x44,0x70,0x00,
0x21,0x69,0xF2,0x5E,0x44,0x20,0x00,
*/
/*
// TnklBell
0x01,0x45, // modify BO:0 -> BO:1
0x30,0x46,0xF5,0x41,0x44,0xE0,0x03,
0x70,0x66,0xCE,0x2E,0x44,0x20,0x00,
0x20,0x26,0xC5,0x78,0x44,0x77,0x08,
0x40,0x55,0xFD,0x04,0x54,0x60,0x00,
*/
/*
// NewAgePd
0x01,0x45, // modify BO:0 -> BO:1
0x31,0x3F,0xF0,0x98,0x44,0x70,0x0D,
0x40,0x47,0xF0,0x2E,0x44,0x50,0x00,
0x00,0x11,0x60,0x62,0x03,0x17,0x0E,
0x00,0x51,0x81,0x02,0x03,0x10,0x00,
*/
/*
// RimShot
0x00,0x45,
0x59,0x50,0xF0,0x14,0x44,0xC0,0x17,
0x79,0x77,0xF7,0x00,0x44,0xB0,0x00,
0x68,0x6A,0xF8,0x00,0x44,0xC0,0x00,
0x78,0x77,0xF7,0x00,0x44,0x70,0x10,
*/
/*
// Castanet
0x01,0x45, // modify BO:0 -> BO:1
0x58,0x97,0xFF,0x08,0x44,0x70,0x0E,
0x59,0xF8,0xAF,0x00,0x44,0x50,0x30,
0x68,0x55,0xF0,0x9C,0x44,0x20,0x28,
0x98,0x9A,0xCA,0x50,0x44,0x50,0x00,
*/
ここには、GrandPiano E.Piano TenorSax PickBass TnklBell NewAgePd RimShot Castanetの八種類の音源があり、これをコピペすることで音色を変えれそうです。
今日は、ここまで。