


唐突ですが、超音波で弾く楽器をつくりたいです。

設計のイメージは右図のように、超音波センサを上向きで置き、そこに手をかざして演奏します。音階はかざす手の高さによって決まっています。
次に、楽器のシステムを考えます。超音波センサは、以前のブログでも紹介したSRF-02を使います。また、マイコンから音を出す回路も前回のブログで書いたスピーカー駆動回路を使います。

右図が簡単なシステム図です。
超音波センサSRF02は、検知した距離をI2Cのシリアル通信またはUARTにて出力します。今回は、配線が簡単なI2Cを使うことにしました。
超音波センサからArduinoには、I2Cを経由して距離が数値で入力されます。
その数値をArduino内で処理し、音階のデータに変換して、スピーカーに出力します。
つぎにプログラムを設計するため、フローチャートを書きました。
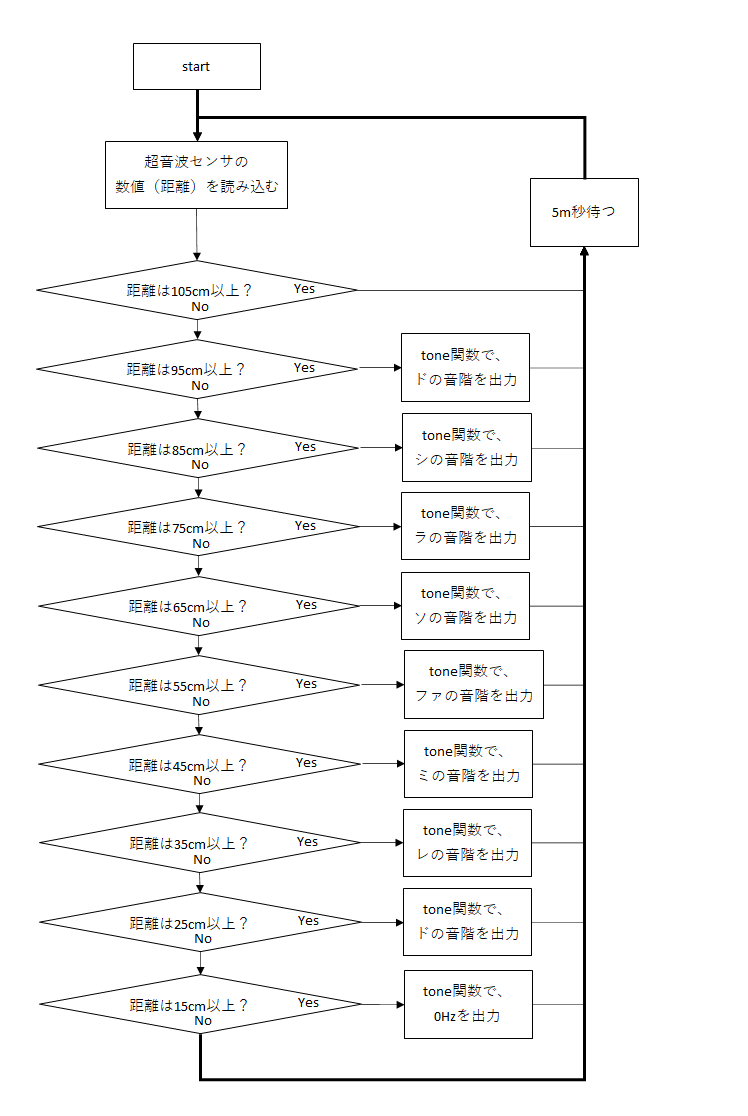
プログラムをスタートすると、まず超音波センサの値を読み込みます。
すると、超音波センサは、かざした手までの距離をcm単位で数値を返します。
その距離を、Arduino内では、何層にも重ねたif文で条件を分岐し、各音階の周波数を割り当てます。
次に、if文内の処理について説明します。
まず、高さが105cm以上であるかないかを判別します。高さが105cm以上であれば、プログラムや音階は現状維持となります。つまり、前出した音階を継続します。105cmはかなり高い高さなので、かざしていない場合を想定しています。
次に、105cm以上がNoであった場合、次は95cm以上かどうかを判別します。95cm以上であれば、手は95cm~105cmの間にあるということですから、ドの音階を出力させます。
続いて、85cm以上ならシ、75cm以上ならラ、と分岐していき、最後、15cm以上で、下のドとなります。
それぞれ、音階を出力したら、処理はまた振り出しに戻り、センサの値を読み込むところからやり直します。
これを、プログラムのコードに直すと下記のようになります。
#include <Wire.h>
void setup()
{
Wire.begin(); // join i2c bus (address optional for master)
Serial.begin(9600); // start serial communication at 9600bps
pinMode(11,OUTPUT);
}
int reading = 0;
int SPEAKER = 11;
int TIME=100;
int m[9]={262,294,330,349,392,440,494,524,0 };
int melody=0;
void loop()
{
// step 1: instruct sensor to read echoes
Wire.beginTransmission(112); // transmit to device #112 (0x70)
// the address specified in the datasheet is 224 (0xE0)
// but i2c adressing uses the high 7 bits so it's 112
Wire.write(byte(0x00)); // sets register pointer to the command register (0x00)
Wire.write(byte(0x51)); // command sensor to measure in "centimeters" (0x51)
// use 0x51 for centimeters
// use 0x52 for ping microseconds
Wire.endTransmission(); // stop transmitting
// step 2: wait for readings to happen
delay(20); // datasheet suggests at least 65 milliseconds
// step 3: instruct sensor to return a particular echo reading
Wire.beginTransmission(112); // transmit to device #112
Wire.write(byte(0x02)); // sets register pointer to echo #1 register (0x02)
Wire.endTransmission(); // stop transmitting
// step 4: request reading from sensor
Wire.requestFrom(112, 2); // request 2 bytes from slave device #112
// step 5: receive reading from sensor
if (2 <= Wire.available()) // if two bytes were received
{
reading = Wire.read(); // receive high byte (overwrites previous reading)
reading = reading << 8; // shift high byte to be high 8 bits
reading |= Wire.read(); // receive low byte as lower 8 bits
Serial.print(reading); // print the reading
Serial.println("cm");
if(reading>105){
}else if(reading>95){
melody=m[7];
tone(11,melody) ;
delay(TIME);
}else if(reading>85){
melody=m[6];
tone(11,melody) ;
delay(TIME);
}else if(reading>75){
melody=m[5];
tone(11,melody) ;
delay(TIME);
}else if(reading>65){
melody=m[4];
tone(11,melody) ;
delay(TIME);
}else if(reading>55){
melody=m[3];
tone(11,melody) ;
delay(TIME);
}else if(reading>45){
melody=m[2];
tone(11,melody) ;
delay(TIME);
}else if(reading>35){
melody=m[1];
tone(11,melody) ;
delay(TIME);
}else if(reading>25){
melody=m[0];
tone(11,melody) ;
delay(TIME);
}else if(reading>15){
melody=m[8];
tone(11,melody) ;
delay(TIME);
}
tone(11,melody) ;
}
delay(5); // wait a bit since people have to read the output :)
}ここで、新たに登場した関数は、wire関数です。
#include<Wire.h>
Wire.hの関数をincludeで呼び出しています。Wire関数は、I2Cのシリアル通信を行う最に使う関数で、Wire.read();などで、シリアルのデータを読み込むことができるなどします。
私もこの関数は知らなかったのですが、少し奥が深そうなので、後日まとめて掲載できたらと思います。
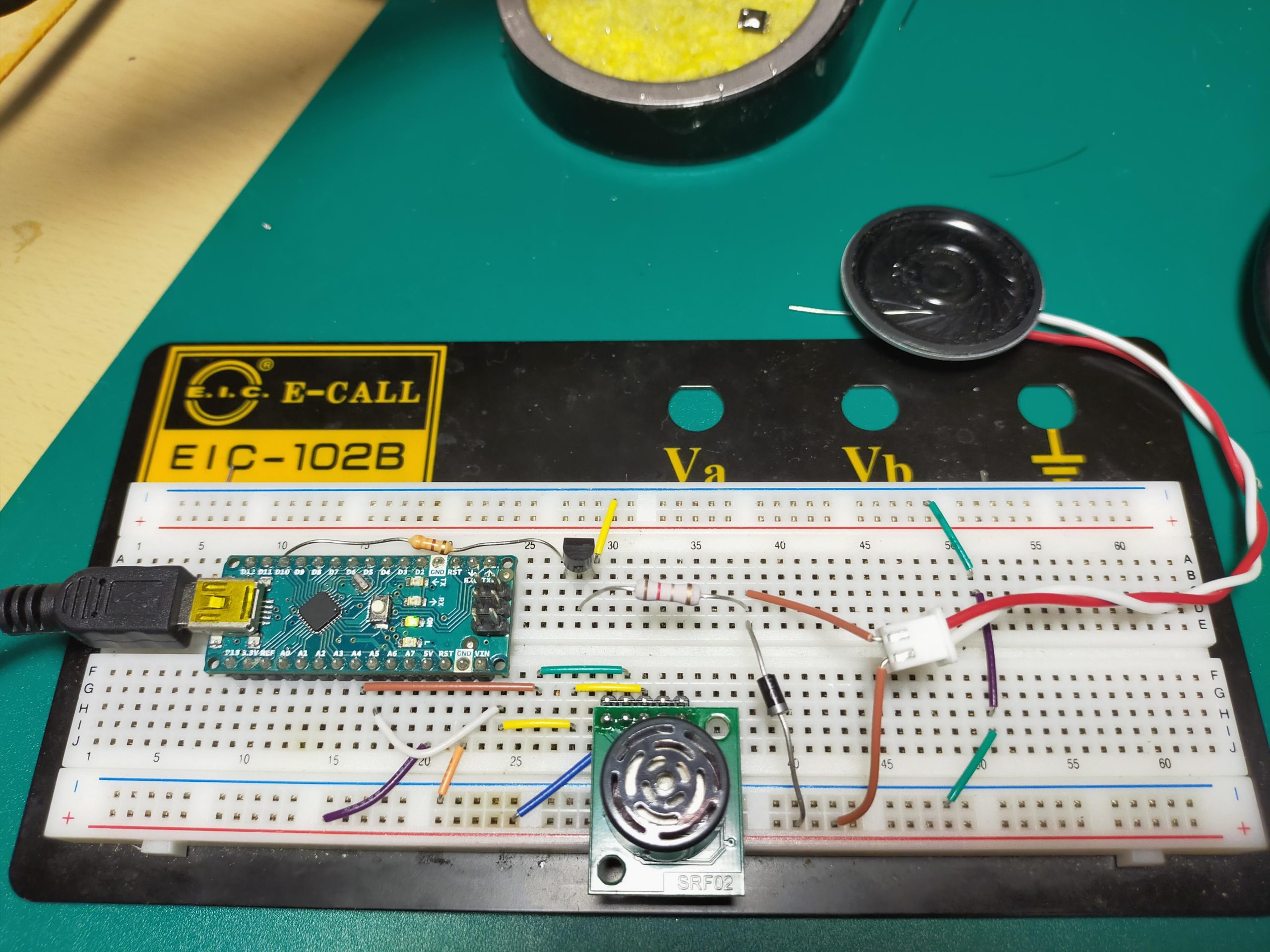
さっそくブレッドボードで配線を組みました。
次回は、これの動作チェックをします。
2021/7/29 ひいらぎ